

Crane simulator somatic simulation method and device
A simulation method and technology for a simulation device, which are applied to simulation devices, simulators, instruments and other directions of space navigation conditions, can solve problems such as device limitations, non-compliance with crane operating environment requirements, and small field of view, and reduce the complexity of mechanical structures. , Reduce the cost of procurement and maintenance, the human body feels the realistic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
[0035] The invention relates to a somatosensory simulation method and device for a crane simulator, comprising a parallel three-degree-of-freedom motion platform, a somatosensory simulation control method, and a washing-out algorithm.
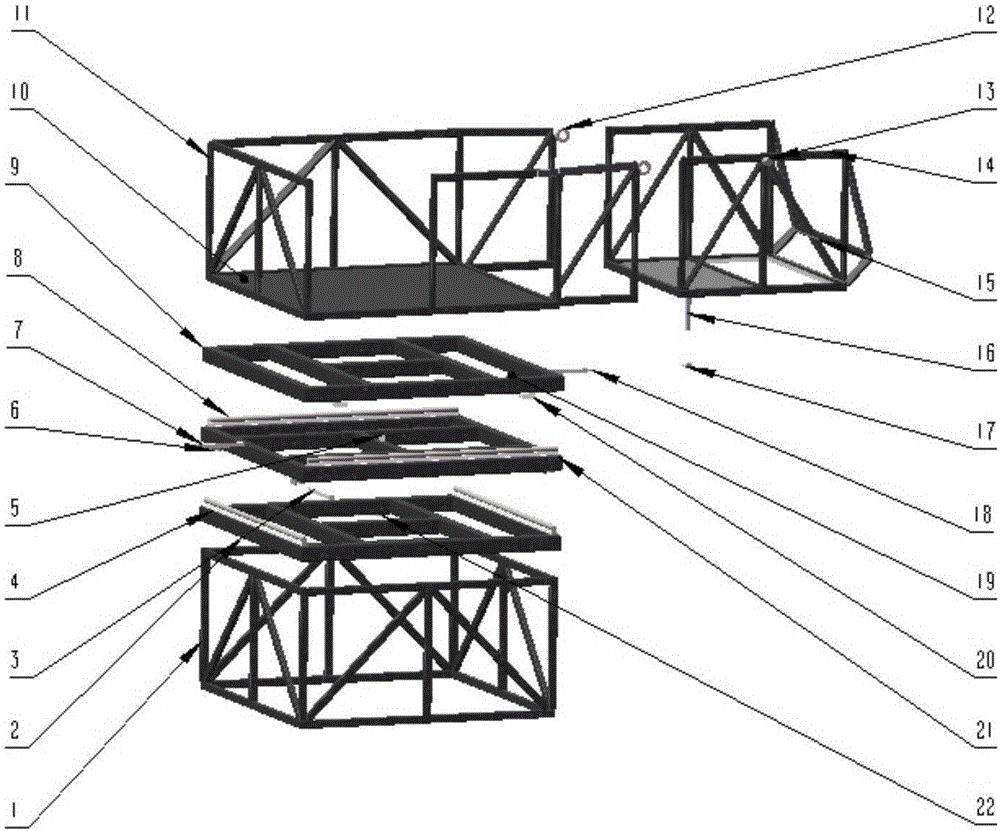
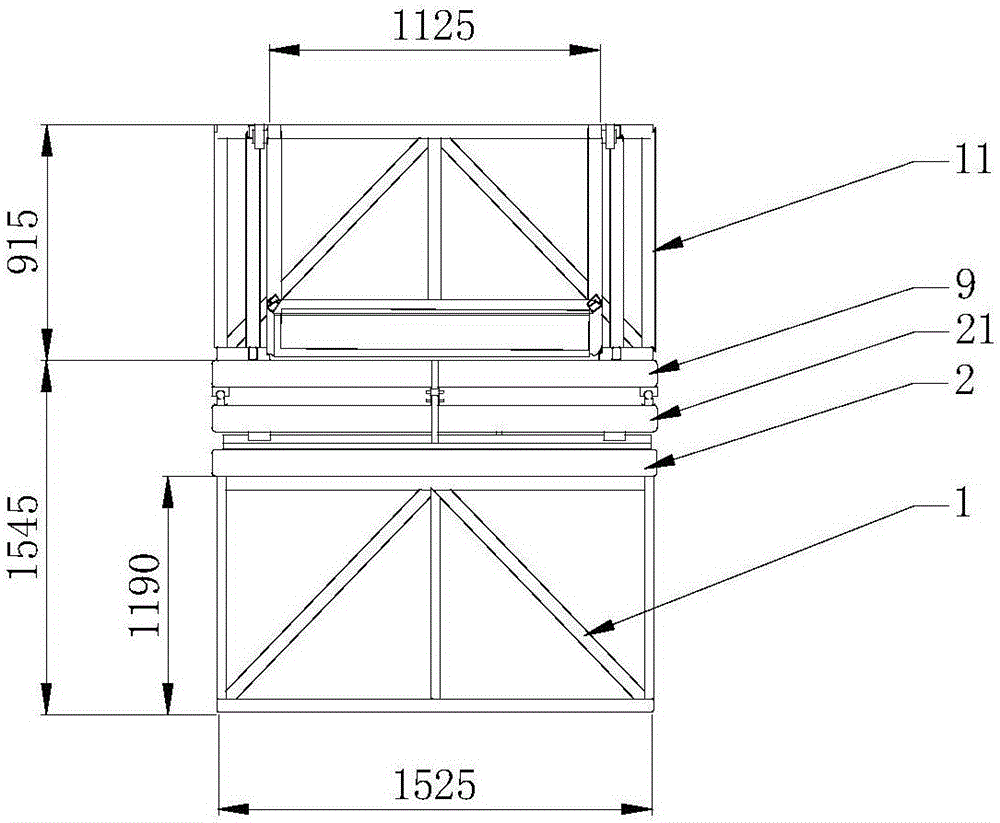
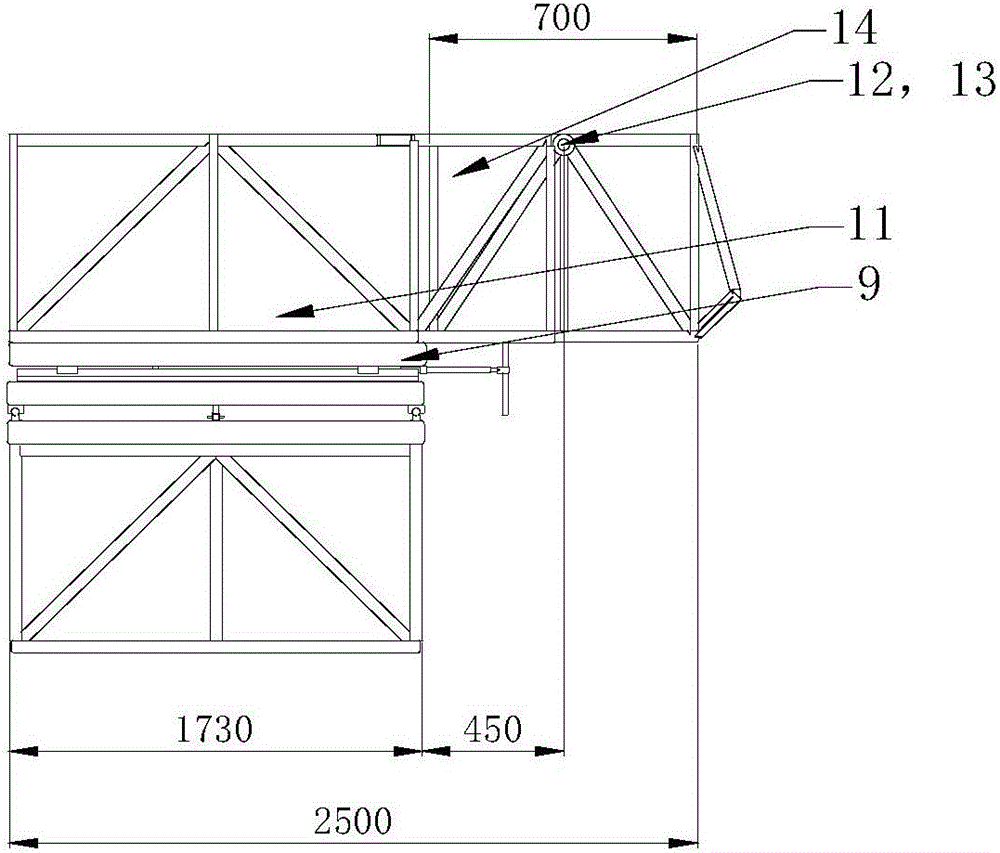
[0036] combine figure 1 , the motion mechanisms of the motion platform are realized by the following methods: the parallel three-degree-of-freedom motion platform includes three sets of rail frames 2, 21, and 9 with the same size, and the horizontal rails 4 laid by the lower rail frame 2 are installed with the middle rail frame 21. The sliding sleeve 6 cooperates, and the two ends of the transverse guide rail 4 are equipped with baffles; the longitudinal rail 8 laid by the middle rail frame 21 cooperates with the sliding sleeve 20 installed on the upper rail frame 9, and the two ends of the longitudinal rail 8 are equipped with baffle p...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Height | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More