

Ceiling-based indoor moving robot vision positioning method
A mobile robot and visual positioning technology, which is applied in the direction of instruments, image data processing, measuring devices, etc., to achieve the effects of not being easily blocked, increasing accuracy, and simplifying the process of determining control points
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
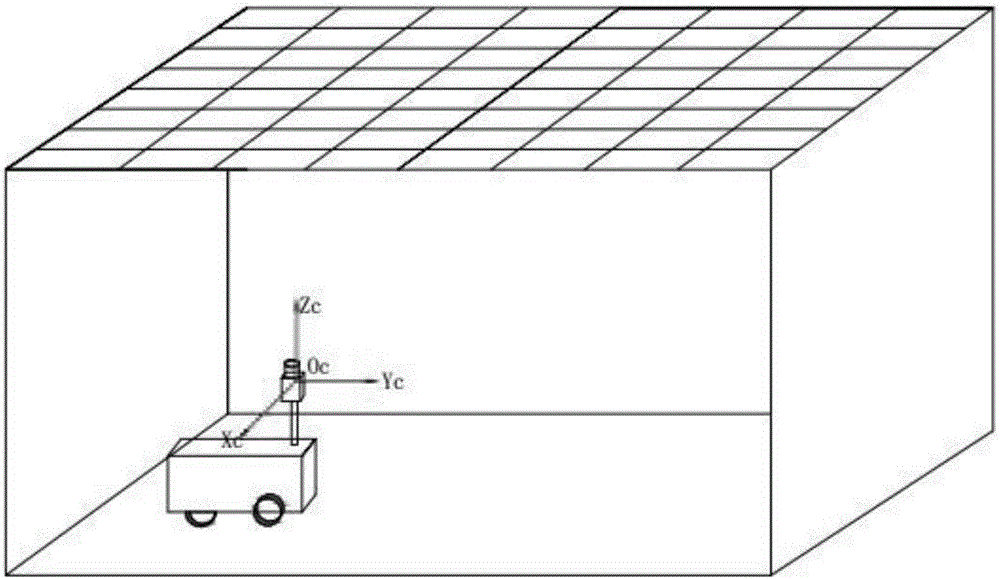
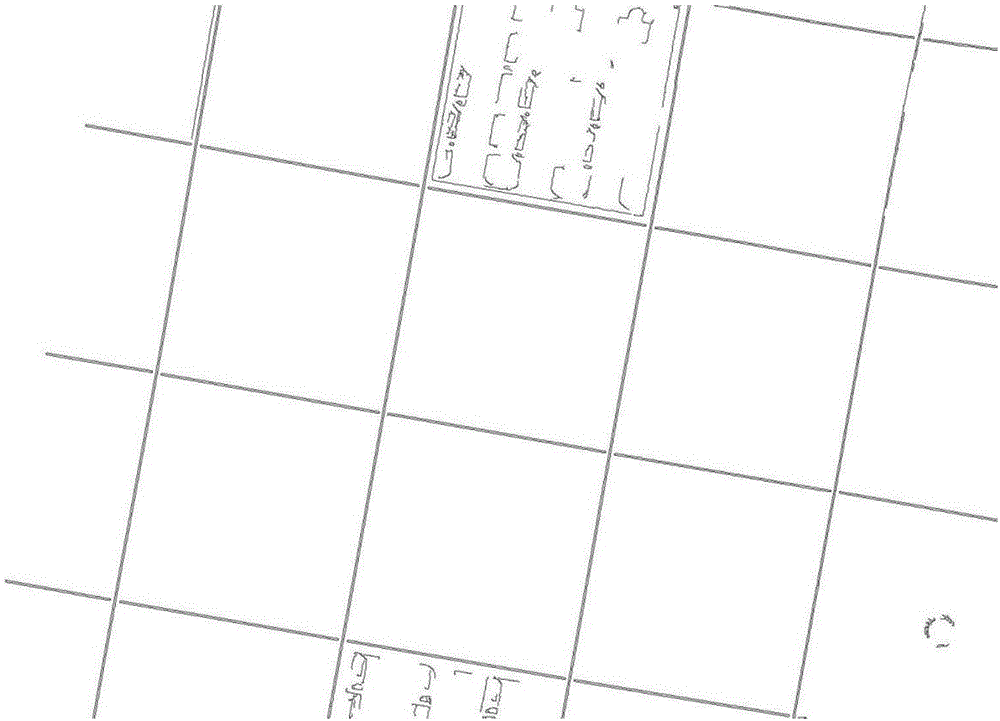
[0028] Such as Figure 1 to Figure 3 As shown, the indoor mobile robot adopted in the indoor mobile robot visual positioning method based on the ceiling in this embodiment includes a robot motion module, a camera, an image processing unit and an inertial navigation system; Image processing unit, the image processing unit analyzes the ceiling photos for visual positioning, the robot's motion module is responsible for the robot's own motion and camera position adjustment, and the inertial navigation system dynamically measures the robot's motion increment. The visual positioning method of this embodiment is used in a room with a ceiling or a similar ceiling structure, and the ceiling structure or similar ceiling structure needs to be divided into a plurality of square grids with the same shape in advance.
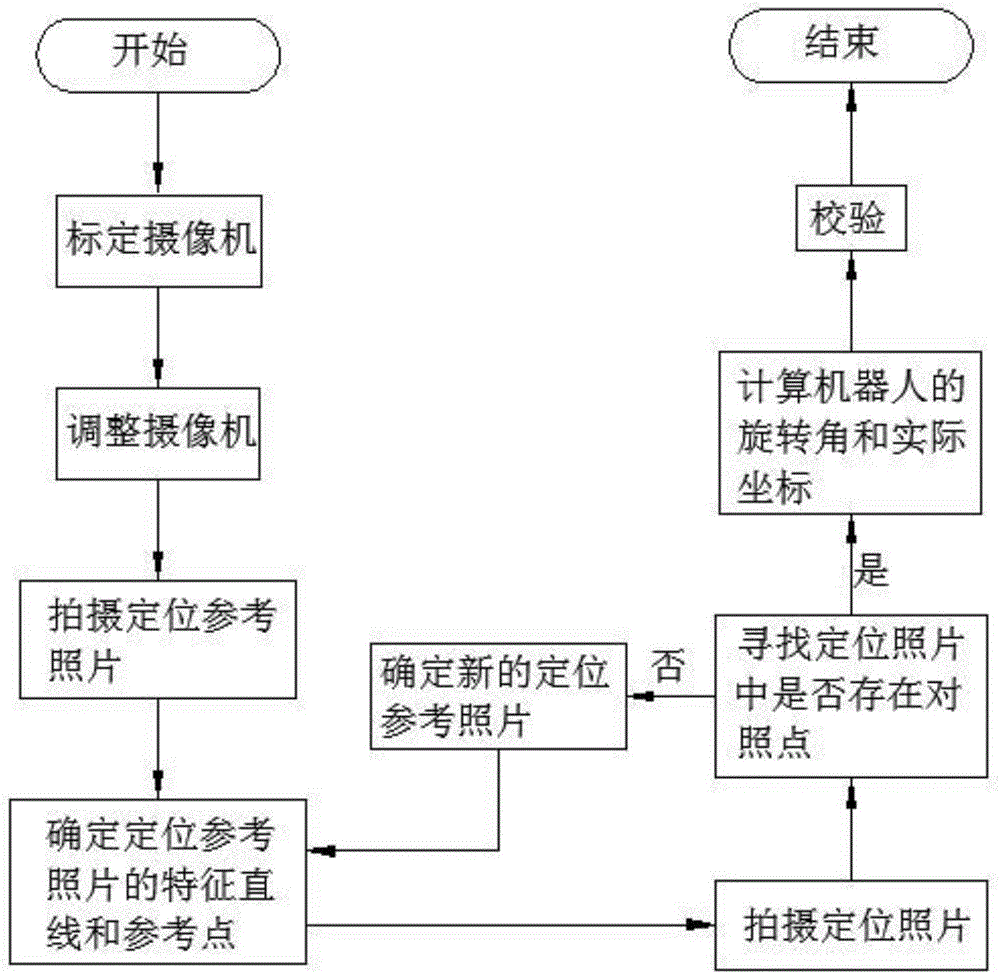
[0029] In this embodiment, the specific implementation steps of the ceiling-based indoor mobile robot visual positioning method are as follows:
[0030] (1) Use the checkerb...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More