

Underactuated humanoid dexterous robotic hand device
A dexterous hand and under-actuated technology, applied in the field of anthropomorphic robot technology and application, can solve the problems that a single finger cannot be actively bent, poor adaptability to objects of different shapes, and large differences between dexterity and human hands, etc., to achieve automatic grasping Strong adaptability, high grasping rigidity, and the effect of improving grasping stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0048] Specific embodiments of the patent of the present invention will be described in detail below in conjunction with technical solutions and accompanying drawings.
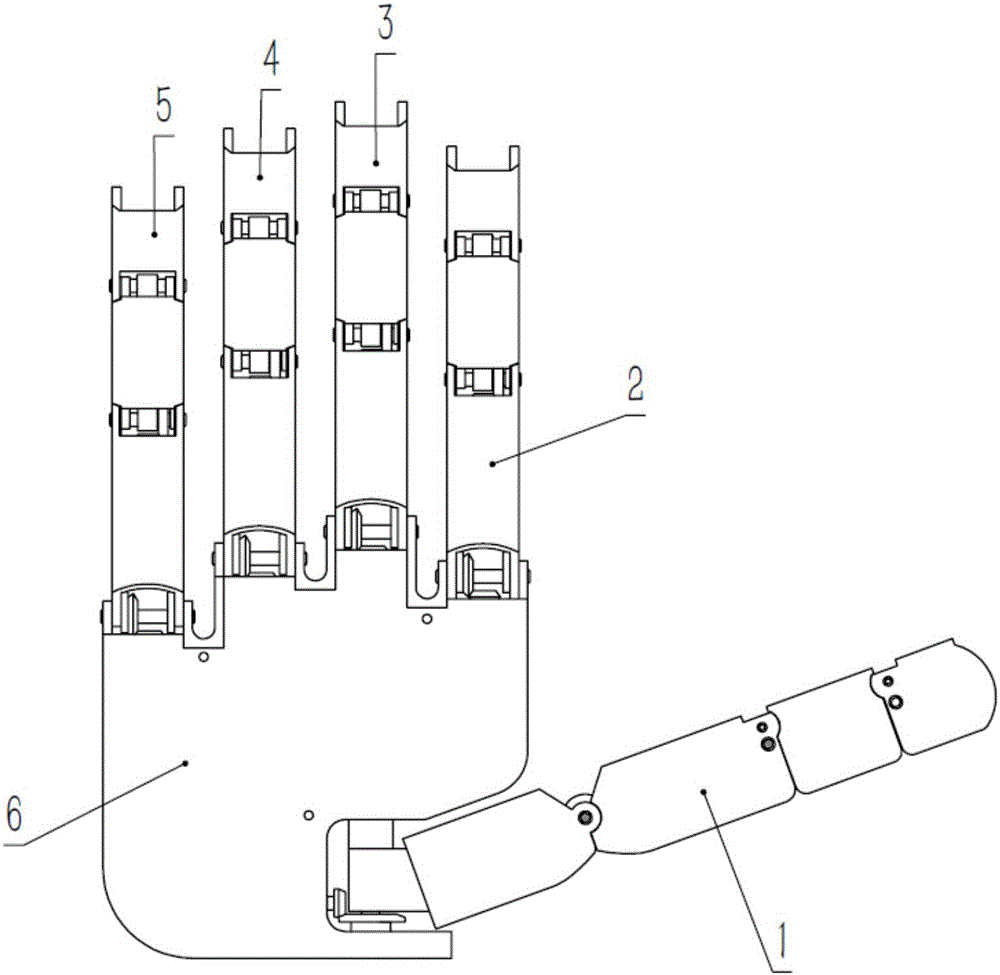
[0049] The overall structure of the underactuated humanoid dexterous hand device described in the present invention is as follows: figure 1 As shown, it includes five fingers and a palm, wherein the five fingers are thumb 1, index finger 2, middle finger 3, ring finger 4 and little finger 5. The index finger 2, the middle finger 3, the ring finger 4 and the little finger 5 are all composed of four parts: a base, a base knuckle, a middle knuckle, and a terminal knuckle, and each knuckle has a degree of freedom of bending and straightening. Thumb 1 is composed of five parts: thumb rotating boss 11, thumb base 12, thumb base knuckle 13, thumb middle knuckle 14 and thumb end knuckle 15. Except for thumb rotating boss 11, other structures are the same as the other four fingers . The entire thumb 1 also has a degr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More