

Mechanical modeling method for nonholonomic constraint system
A non-holonomic constraint and mechanical modeling technology, applied in the field of robot dynamics modeling, can solve the problems of repeated calculation of variables, low calculation efficiency, and long and complicated output, so as to reduce complexity, reduce time-consuming calculation, extend and build Effect of Die Depth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be described below in conjunction with the accompanying drawings and embodiments, but not to limit the content of the present invention.
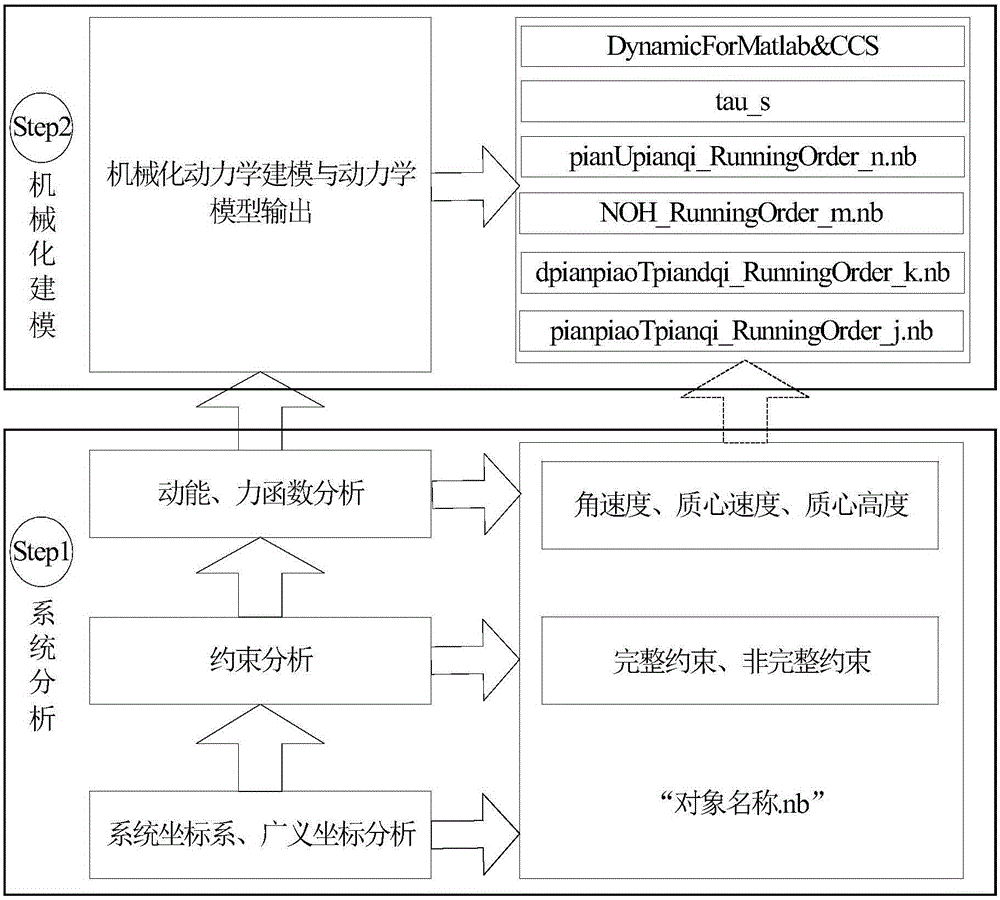
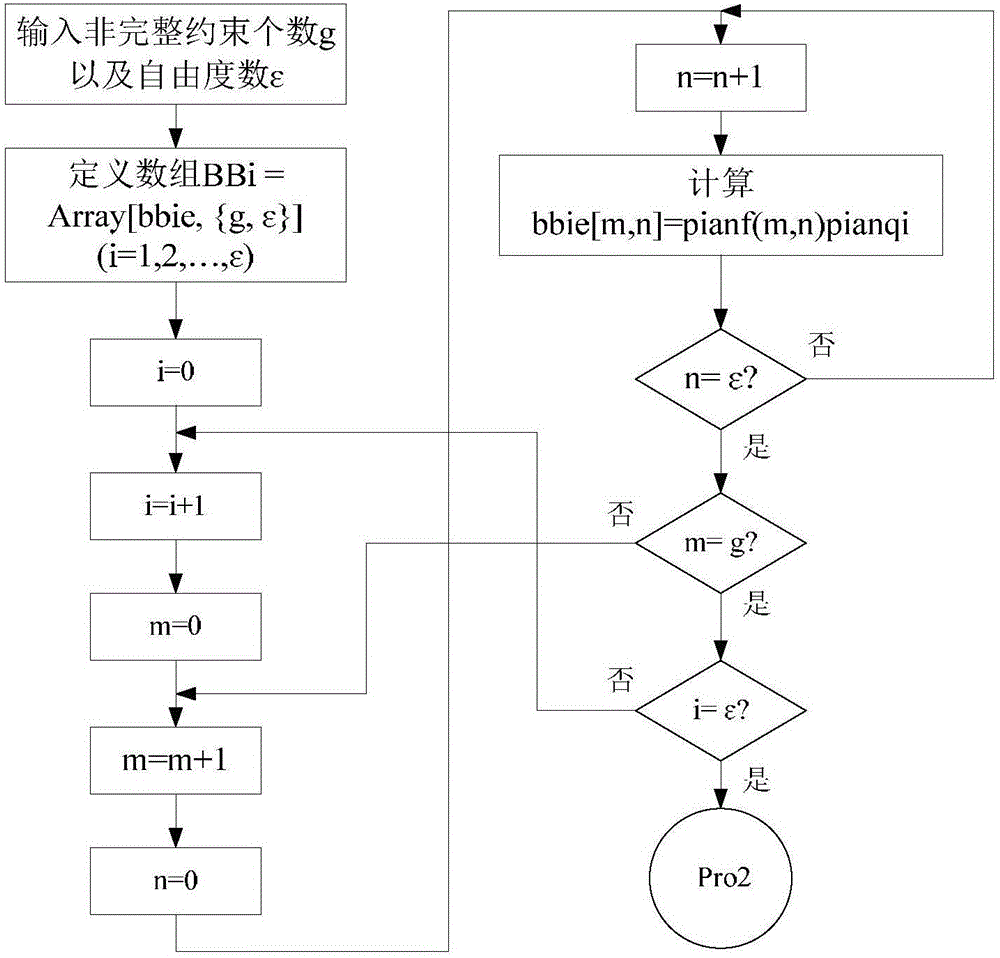
[0031] Assuming that a mechanical system is a nonholonomic constrained system, the position shape of the system at any time is composed of n generalized coordinates q s (s=1,2,…,n) to determine, the system is subject to g nonholonomic constraints of the following form,
[0032]
[0033] According to the Chaprekin equation,
[0034] d d t ∂ T ~ ∂ q · σ - ∂ T ~ ∂ q σ + ∂ V ∂ q ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More