

Robot used for high risk operation
A robot and operation technology, applied in the field of robots, to achieve the effect of small size, safety guarantee and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
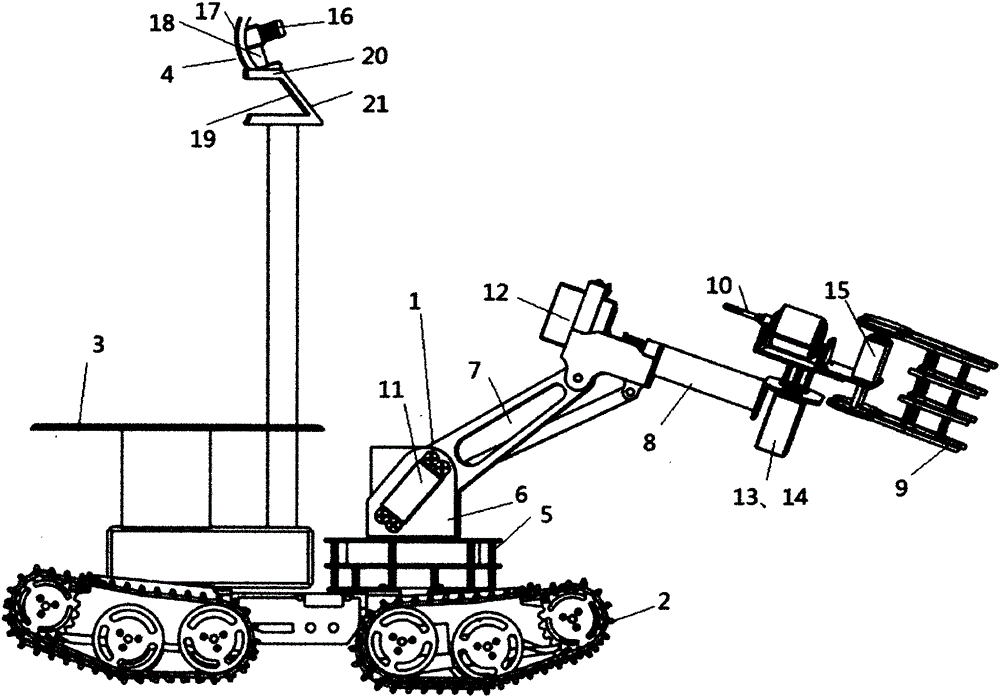
[0033] see figure 1 , In an embodiment of the present invention, a robot for high-risk operations includes a robot body, a robot arm, and a helmet.
[0034] 1. Robot body
[0035] The robot car body, including the robot arm 1, the crawler chassis 2, the solar sail panel 3 and the camera device 4, the robot arm 1 and the solar sail panel 3 are all placed on the crawler chassis 2, and the middle position of the solar sail panel 3 is provided with a support rod, and the support rod is fixed on the crawler chassis 2, and the top of the support rod is provided with a camera device 4.
[0036] The robotic arm 1 includes a large bearing 5, a small slanting rod 6, a slanting rod 7, a horizontal axis 8, a manipulator 9, an electric drill 10 and a steering gear. The steering gear includes a mechanical arm turning steering gear, a mechanical arm elbow steering gear 11, Wrist clapping steering gear 13, function switching steering gear 14, manipulator opening and closing steering gear 15...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More