

Daytime climbing flight method for reducing weight and size of solar unmanned aerial vehicle
A solar unmanned aerial vehicle, solar energy technology, applied in unmanned aerial vehicles, solar panel accessories, weight reduction and other directions, can solve the limitation of the expansion of the load capacity of the solar unmanned aerial vehicle, the flight performance, and the energy density consumption of the secondary power supply The problems of large manpower, financial resources and time, and low energy density of the secondary power system have achieved the effect of improving the wind resistance and structural strength, making it difficult to realize and difficult to manufacture.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0020] Design requirements: the flight time is between the vernal equinox and the autumnal equinox, the flight latitude is 35°north latitude, the minimum cruising altitude is 18km, the mission load power is 2kw, the load weight is 100kg, and the cruise lift-to-drag ratio is 30.
[0021] For a solar-powered UAV cruising at a fixed altitude of 18km, in order to meet the above design requirements, it needs a wing area of 344㎡, a length of 101.6m, and a total weight of 2030kg, of which the weight of the secondary power supply is 854kg. Under the same design input, the higher the fixed altitude cruising altitude, the larger the size and weight of the UAV required. Taking the 19km fixed altitude cruising as an example, the solar drone needs a wing area of 474㎡ and a length of 119.2 m, with a total weight of 2711kg, of which the weight of the secondary power supply is 1176kg.
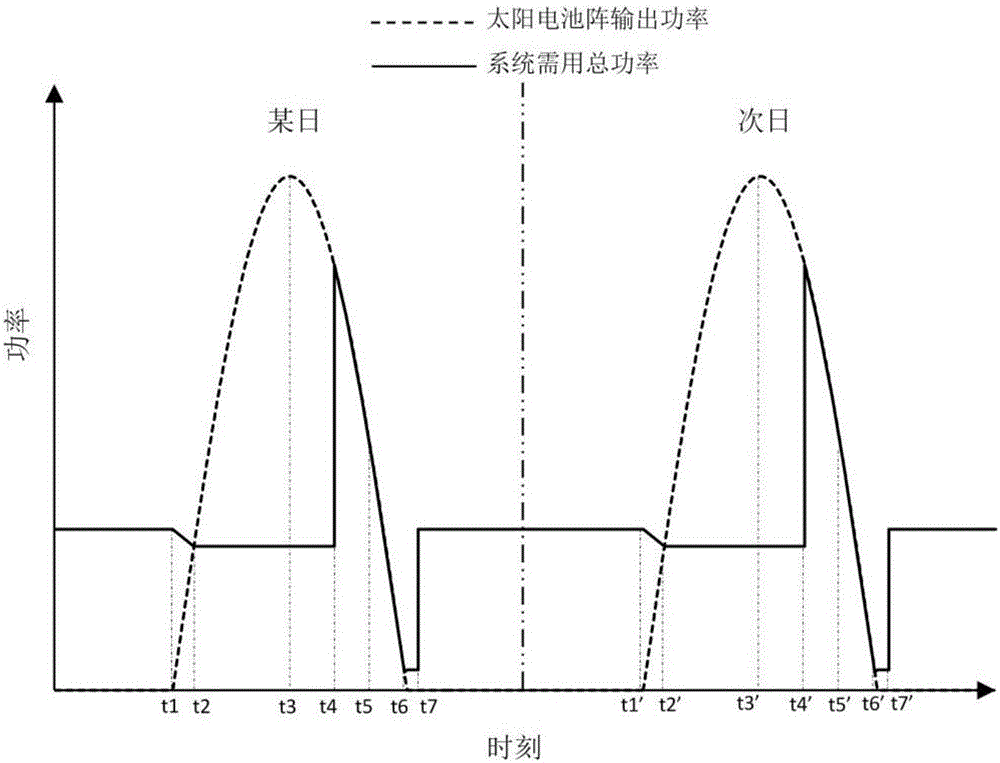
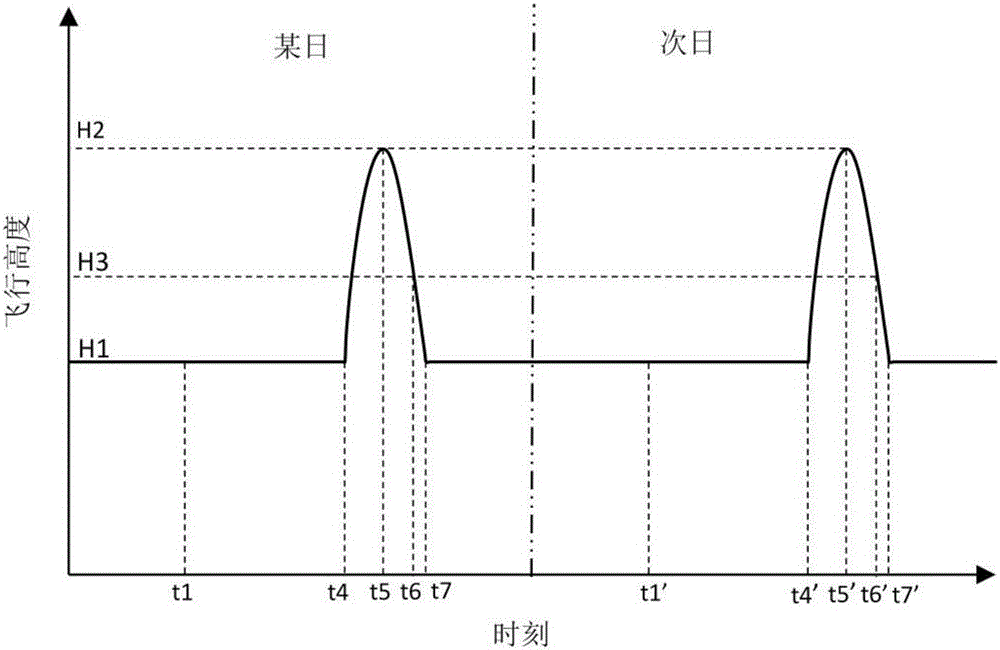
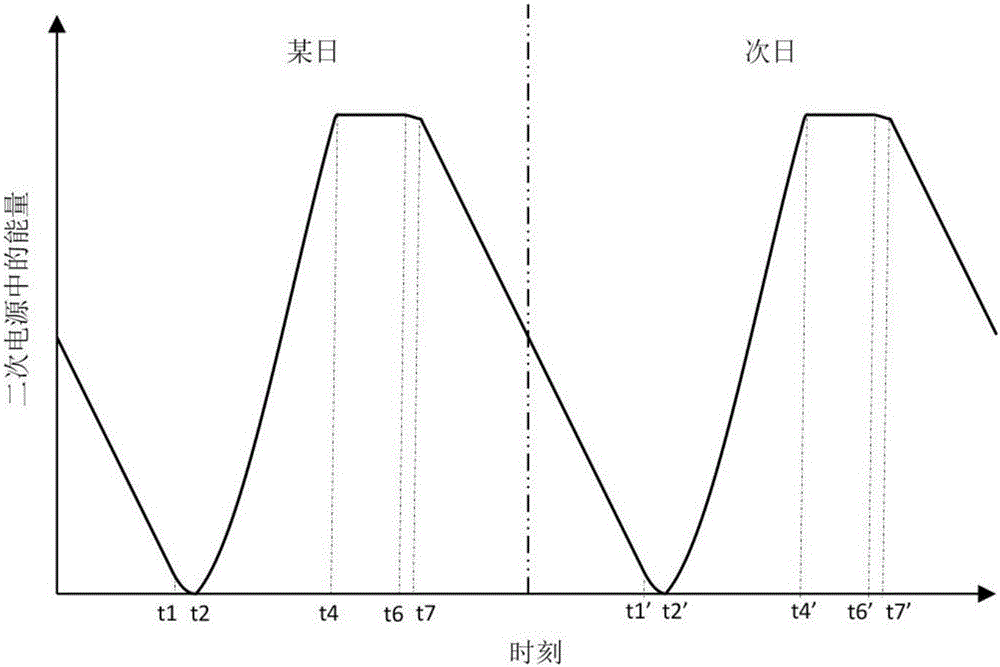
[0022] And adopt the flight strategy of climbing and descending again before sunset described in the pr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More