

Novel submersible for capturing and recovering AUV through long-distance acousto-optic bidirectional guidance
A submersible and long-distance technology, applied in the direction of underwater ships, underwater operation equipment, special-purpose vessels, etc., can solve the problems of complex navigation and operation status of underwater mother ships, low docking accuracy, and low recovery rate, and achieve improved Long-distance docking and guiding capabilities, easy layout, and the effect of improving positioning accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] The specific embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
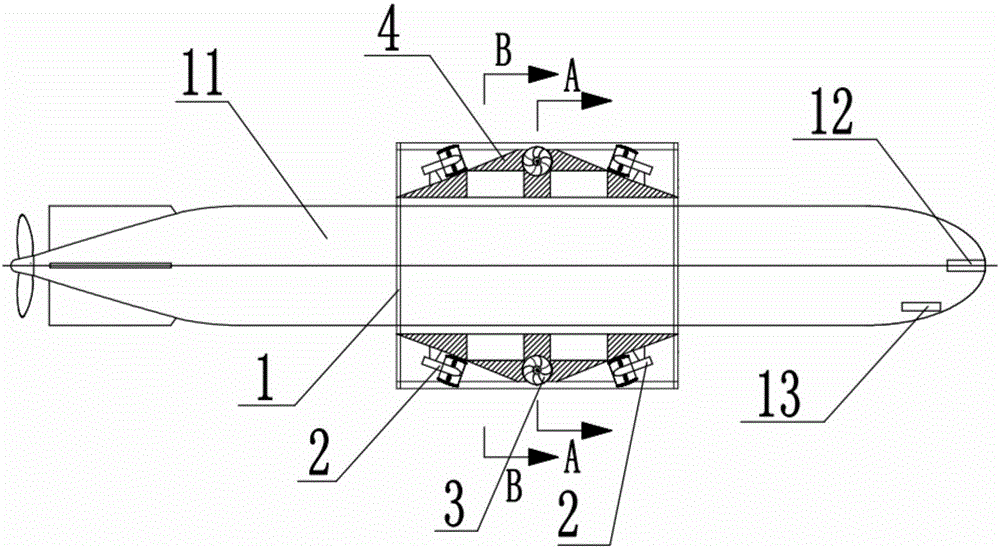
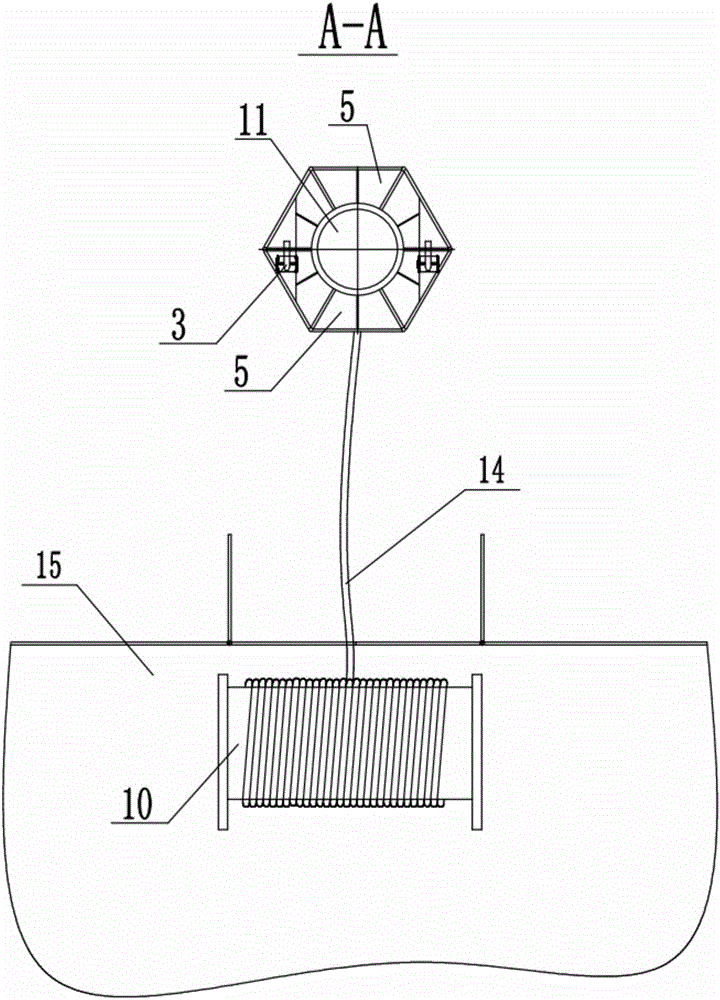
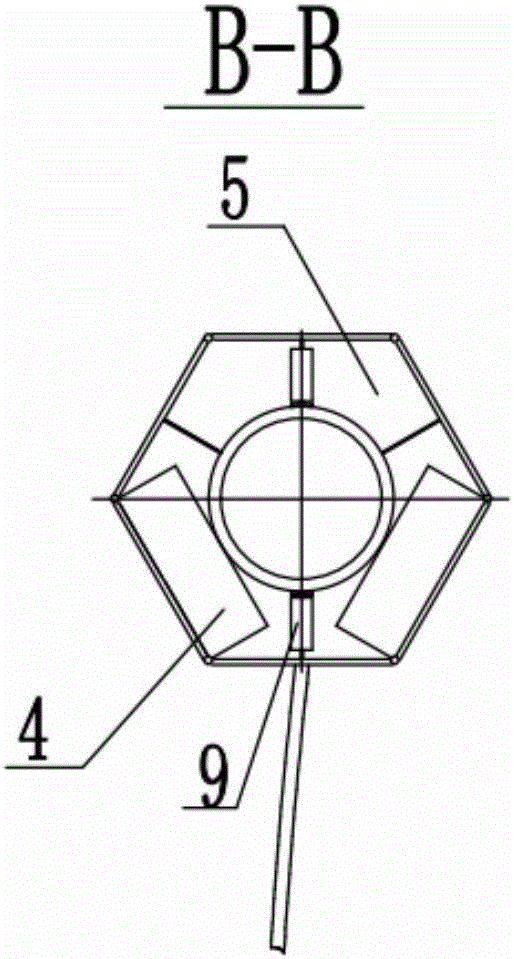
[0023] Such as figure 1 , Figure 4 As shown, the novel submersible used for long-distance acousto-optic two-way guidance to capture and recover AUV in this embodiment is connected with the winch 10 through the umbilical cable 14, and the winch 10 is arranged in the underwater mother ship platform 15, and the mother ship platform 15 The submersible can be released by opening the door; the submersible includes a supporting frame 1, and the supporting frame 1 is used as a carrier for supporting and installing the submersible equipment, and plays a role in protecting the equipment on the submersible. Support frame 1 has the sleeve cavity that can accommodate AUV11, and buoyancy block 5 is installed in support frame 1 (see figure 2 , image 3 ), horizontal thruster 2, vertical thruster 3, fixed clamping mechanism 9 (see image 3 ) and the a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More