

Wheel-type detection mobile robot control system and method
A mobile robot and control system technology, applied in control/adjustment system, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as tilting and rollover, and achieve low cost, reliability and real-time high performance, ensuring safety and reliability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
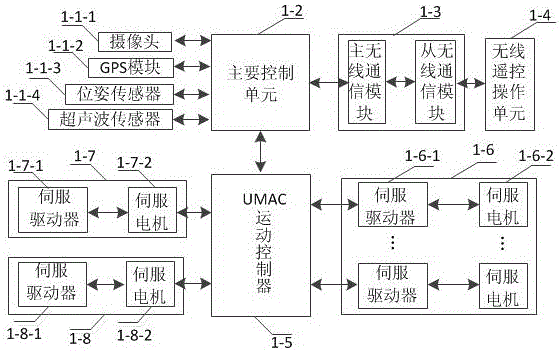
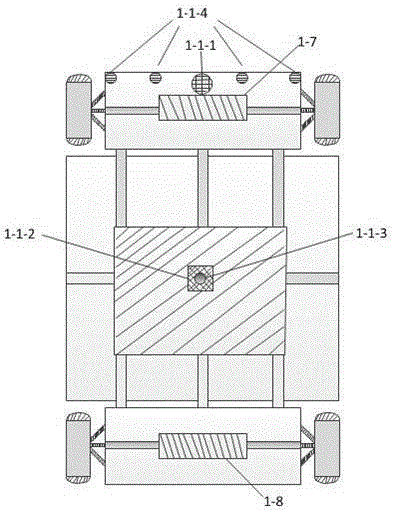
[0032] Specific Embodiment 1: This embodiment will be described in detail with reference to FIG. 1. A wheeled mobile detection robot control system described in this embodiment includes a basic frame of a car body, four driving wheels, and a front and rear steering mechanism. The basic frame, four driving wheels, and the front and rear steering mechanism form a wheeled mobile robot, which also includes a camera 1-4-1, a GPS module 1-4-2, a pose sensor 1-4-3, and an ultrasonic sensor 1-4- 4. Main control unit 1-2, external communication unit 1-3, wireless remote control unit 1-4, UMAC motion control unit 1-5, drive control unit 1-6, front steering control unit 1-7, rear steering control Units 1-8;
[0033] Each of the driving wheels is driven by a DC servo motor, each of the steering mechanisms is driven by a flow servo motor, the camera 1-4-1, the GPS module 1-4-2, the pose sensor 1-4- 3. The main control unit 1-2 and the UMAC motion control unit 1-5 are located inside the ba...
specific Embodiment approach 2
[0040] Embodiment 2: This embodiment is a further description of the control system for a wheeled detection mobile robot described in Embodiment 1. In this embodiment, the external communication unit 1-3 includes a master wireless communication module and a slave wireless communication module. module, the main wireless communication module and the slave wireless communication module are connected wirelessly, the master wireless communication module is connected with the wireless remote control operation unit 1-4 through Ethernet, and the slave wireless communication module is connected with the main control unit 1-2 through Ethernet way to connect.
specific Embodiment approach 3
[0041] Specific embodiment three: This embodiment is a further description of a wheeled detection mobile robot control system described in specific embodiment one. In this embodiment, the camera (1-1-1) adopts Sony industrial-grade high-resolution The XC-ES50 series industrial digital cameras are implemented, the GPS module (1-1-2) is realized by the GSTAR industrial-grade low-power consumption GS-89m-J model, and the pose sensor (1-1-3) is implemented by XSENS MTI- G model realized.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More