

Sliding-mode control method for parameter-free driving-insufficient UUV (Unmanned Underwater Vehicle) vertical plane route tracking
A path tracking and control method technology, applied in non-electric variable control, vehicle position/route/altitude control, altitude or depth control, etc., can solve the problems of real-time improvement, nonlinear processing, etc. The effect of reducing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0022] Specific embodiment one: a kind of non-parameter underdriven UUV vertical surface path tracking sliding mode control method, comprising the following steps:
[0023] The purpose of the present invention is to provide a non-parameter underactuated UUV vertical surface path tracking sliding mode control method that can improve the speed tracking accuracy and reduce the amount of calculation.
[0024] The purpose of the present invention is achieved like this:
[0025] Step 1. Initialization:
[0026] Adaptive parameters for uncertain parameters of UUV Assign an initial value and determine its ideal speed u for the path following process d , define update times t=0, i=1~8;
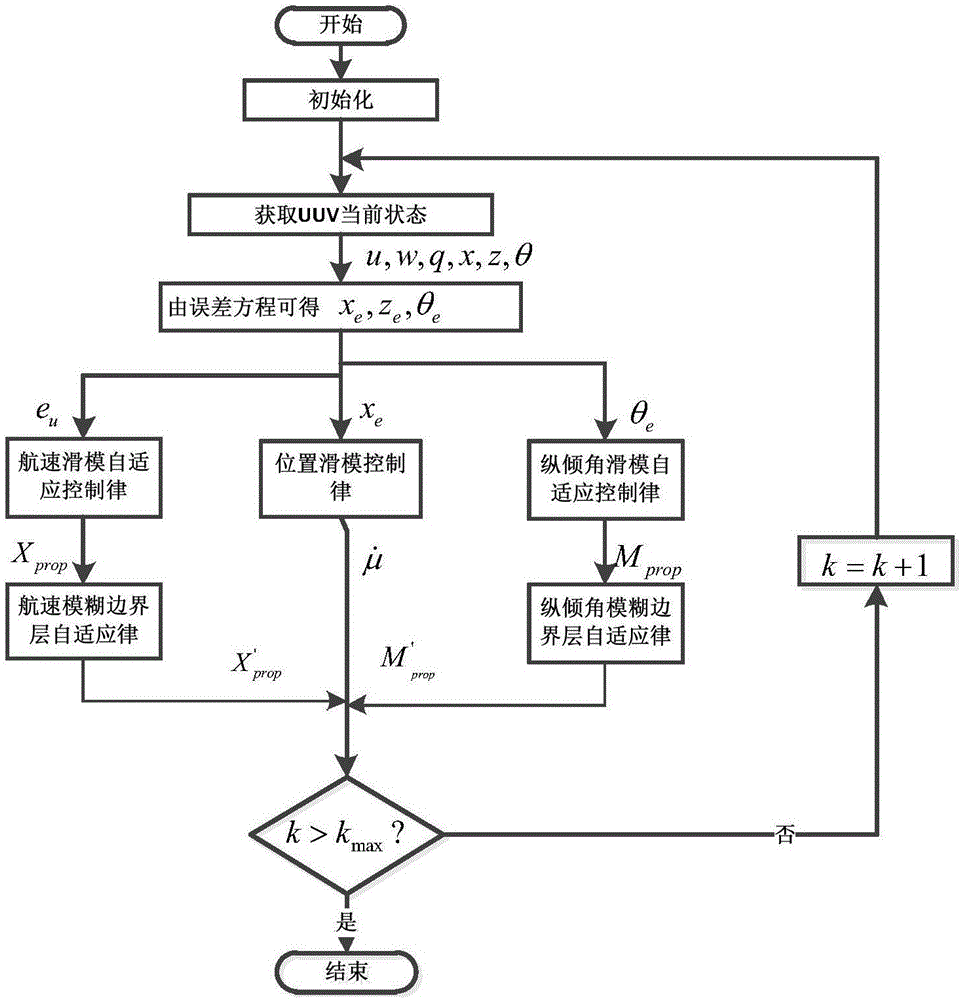
[0027] Step 2. Obtain the current state of the UUV:
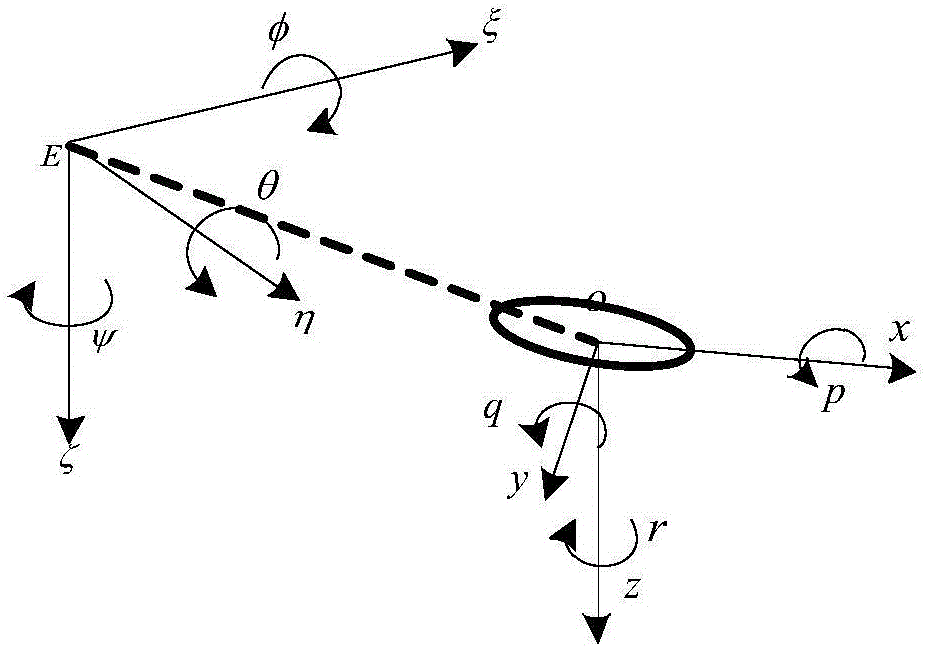
[0028] The current moment status is obtained through the UUV’s own sensors: u, w are the longitudinal and vertical velocities, r is the pitch angular velocity, x, z are the longitudinal and vertical coordinates of the center of gravity of the U...
specific Embodiment approach 2
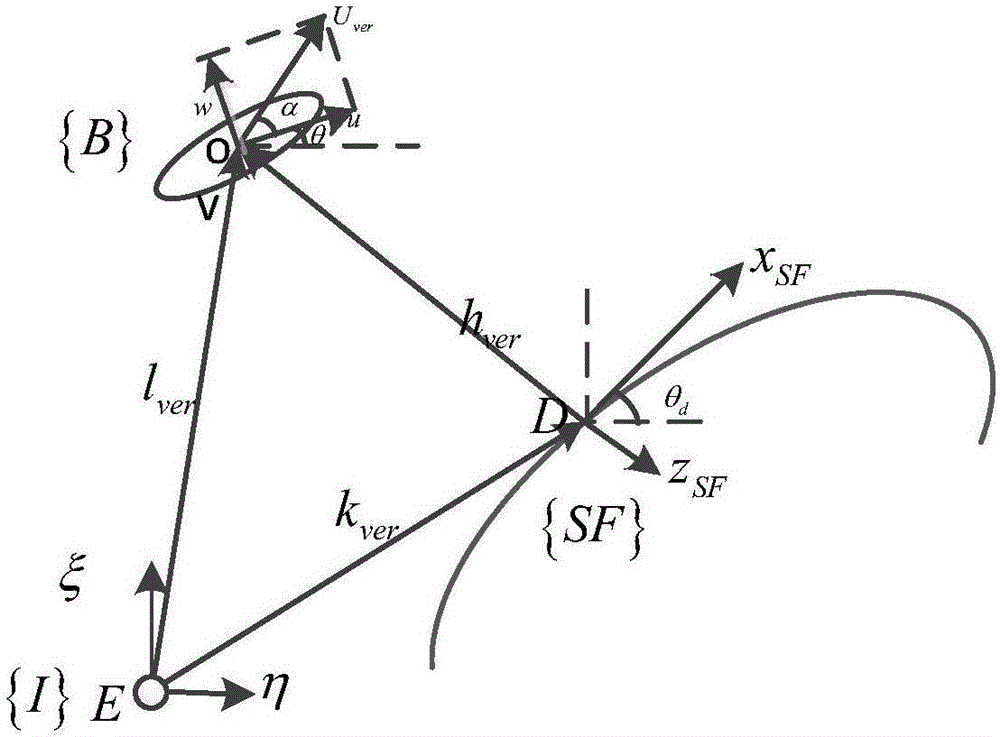
[0034] On the basis of the specific embodiment 1, based on the Serret-Frenet coordinate system described in step 3 of this embodiment, the underactuated UUV horizontal plane error equation is established to obtain the position deviation x e ,z e and heading deviation θ e The specific process is as follows:
[0035] For the movement of UUV in the vertical plane, it is only necessary to establish a three-degree-of-freedom model. The variables to be considered are: position x, z, pitch angle θ, and longitudinal velocity u, lateral velocity w, and pitch angular velocity q. The kinematic equation of UUV vertical plane can be obtained as:
[0036]
[0037] Let the center of gravity of the UUV be at the origin of {B}, gravity and buoyancy are equal, the structure of the UUV is symmetrical left and right, and it is considered to be approximately symmetrical up and down. After a series of simplifications, the dynamic equation of the UUV vertical plane can be obtained as follows: ...
specific Embodiment approach 3
[0062] Embodiment 3: On the basis of Embodiment 1 or Embodiment 2, using the sliding mode control method described in step 4 of this embodiment, in the case of unknown parameters, design the speed sliding mode adaptive control law and the position sliding mode control law respectively. Control law and pitch angle sliding mode adaptive control law, through the thrust X prop , expected speed and torque M prop control so that e u →0,x e →0,θ e The specific process of →0 is as follows:
[0063] Using a novel sliding mode approach rate
[0064]
[0065] Among them, s represents the sliding mode surface function, k>0 is the switching gain, ε>0 is the coefficient of the exponential approach term, and 0α The sgns item plays a major role, and the control quality is improved by appropriately reducing the switching gain.
[0066] Combined with the new approach rate (12), the sliding mode control laws of the speed tracking subsystem and the position tracking subsystem are firstl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More