

Indoor robot positioning method and device
An indoor robot and positioning method technology, applied in the field of indoor robot positioning methods and devices, can solve problems such as being susceptible to interference from other floors, a large number of routers, and inaccurate positioning, so as to avoid network signal interference, reduce the number of accurate positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
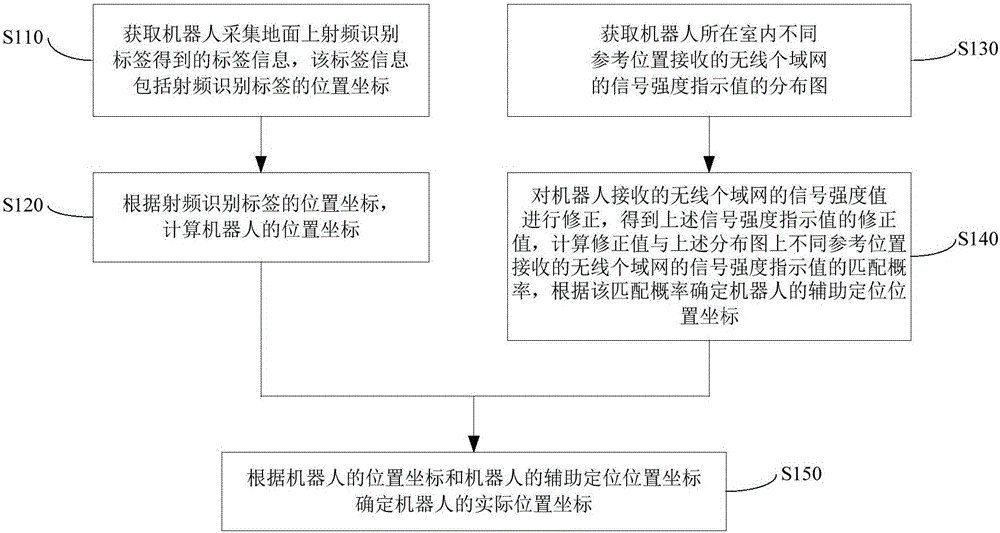
[0053] The embodiment of the present invention provides an indoor robot positioning method. In this method, a wireless personal area network (ZigBee) is used to locate the robot indoors. When positioning is required on multiple floors, there is no need to set up Zigebee on each floor. The node reduces the number of ZigBee nodes, reduces the cost, and at the same time avoids the interference of the network signal between each layer, making the positioning more accurate.
[0054] When using the method provided by the embodiment of the present invention to perform robot positioning, multiple radio frequency identification (RFID) tags need to be affixed on the indoor ground. The above RFID tags can be arranged in an orderly manner indoors, that is, evenly distributed on the ground. It may be randomly arranged, and the embodiment of the present invention does not limit the specific arrangement of the above-mentioned RFID tags.
[0055] In addition, there are multiple ZigBee nodes indoor...
Embodiment 2
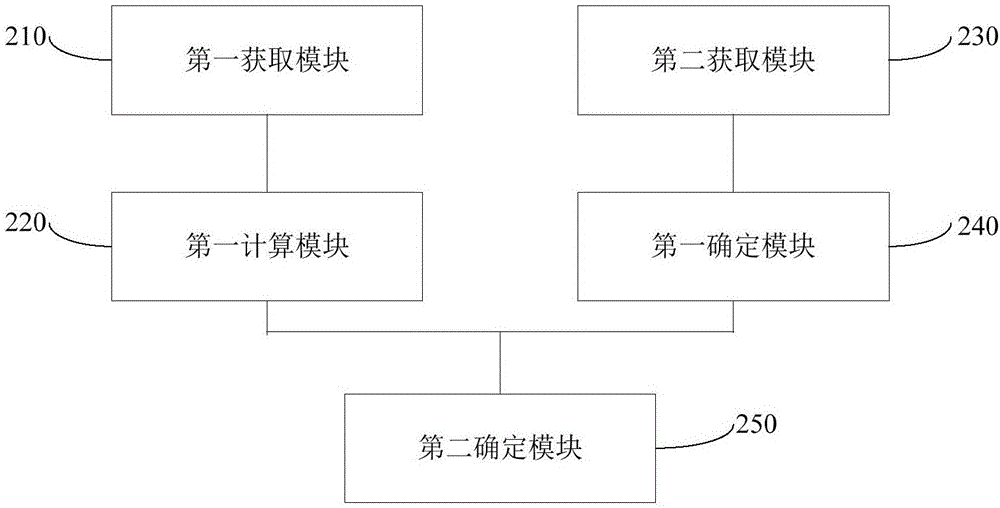
[0108] The embodiment of the present invention provides an indoor robot positioning device, such as figure 2 As shown, the device includes: a first acquisition module 210, a first calculation module 220, a second acquisition module 230, a first determination module 240, and a second determination module 250;
[0109] The above-mentioned first obtaining module 210 is configured to obtain tag information obtained by the robot from collecting radio frequency identification tags on the ground, where the tag information includes position coordinates of the radio frequency identification tags;
[0110] The first calculation module 220 is configured to calculate the position coordinates of the robot according to the position coordinates of the radio frequency identification tag;
[0111] The above-mentioned second acquisition module 230 is configured to acquire the distribution map of the signal strength indication value of the wireless personal area network received at different reference ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More