

Servo power computing method based on Monte Carlo target practice
A power calculation and power technology, applied in calculation, design optimization/simulation, special data processing applications, etc., can solve problems such as power consumption requirements of difficult servo systems, large load fluctuations, and difficult dynamic mathematical models of servo systems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
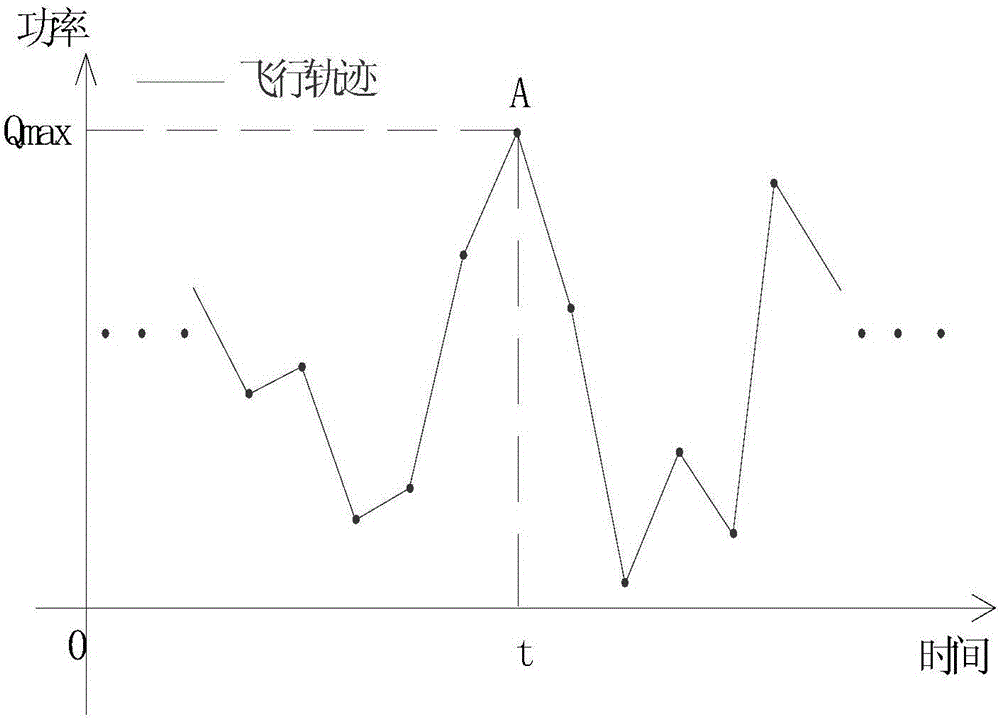
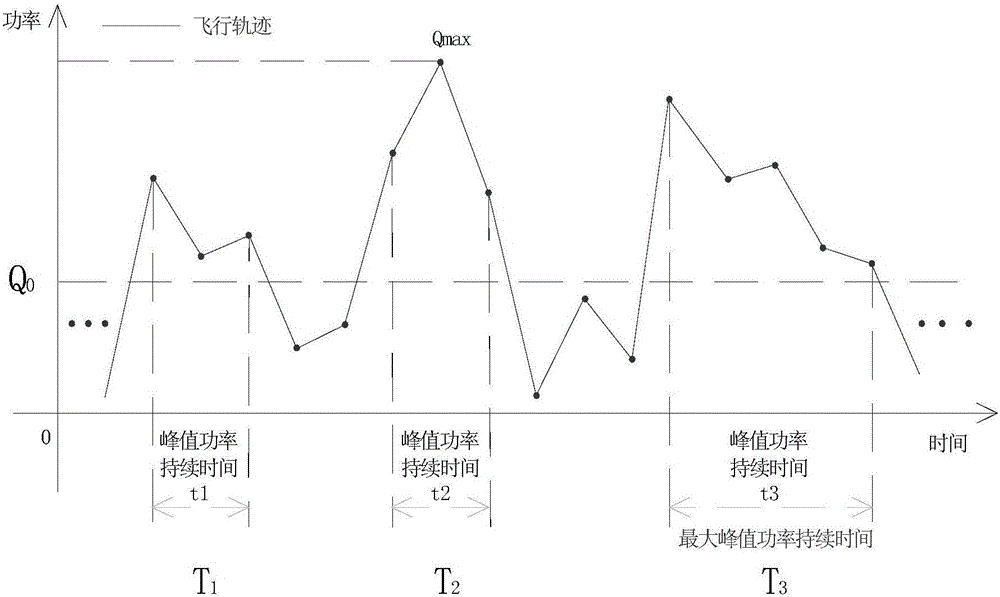
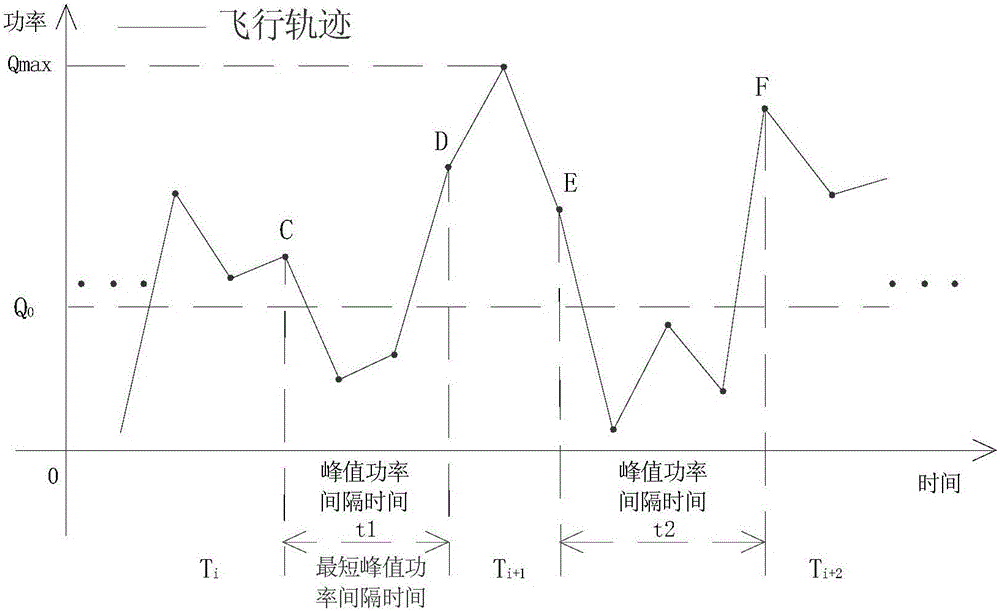
[0069] Build an aircraft six-degree-of-freedom simulation platform in MATLAB software, input the overall original data and the aerodynamic characteristic data of the entire aircraft, set the initial conditions for the simulation, and consider various deviation interference factors to carry out multiple Monte Carlo shooting simulations to obtain the flight trajectories of the aircraft According to the relevant data, the power curve of the steering gear of the aircraft is calculated with time.
[0070] The formula for calculating the power Q of the aircraft steering gear is as follows:
[0071]
[0072] Among them: Q is the steering gear power, M Z is the hinge moment of the steering gear (including the transmission mechanism), M I is the moment of inertia of the steering gear (including the transmission mechanism), M f is the friction torqu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More