Portable type large-variable-diameter all-wheel-drive type pipeline robot
A pipe robot, a portable technology, applied in the direction of special pipes, pipe components, mechanical equipment, etc., can solve the problems of inaccuracy and economy, and the inability of staff to directly detect pipes, so as to achieve the effect of alignment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046]The present invention will be described in detail below in conjunction with specific embodiments. The following examples will help those skilled in the art to further understand the present invention, but do not limit the present invention in any form. It should be noted that those skilled in the art can make several modifications and improvements without departing from the concept of the present invention. These all belong to the protection scope of the present invention.
[0047] Please also see Figure 1 to Figure 5 .
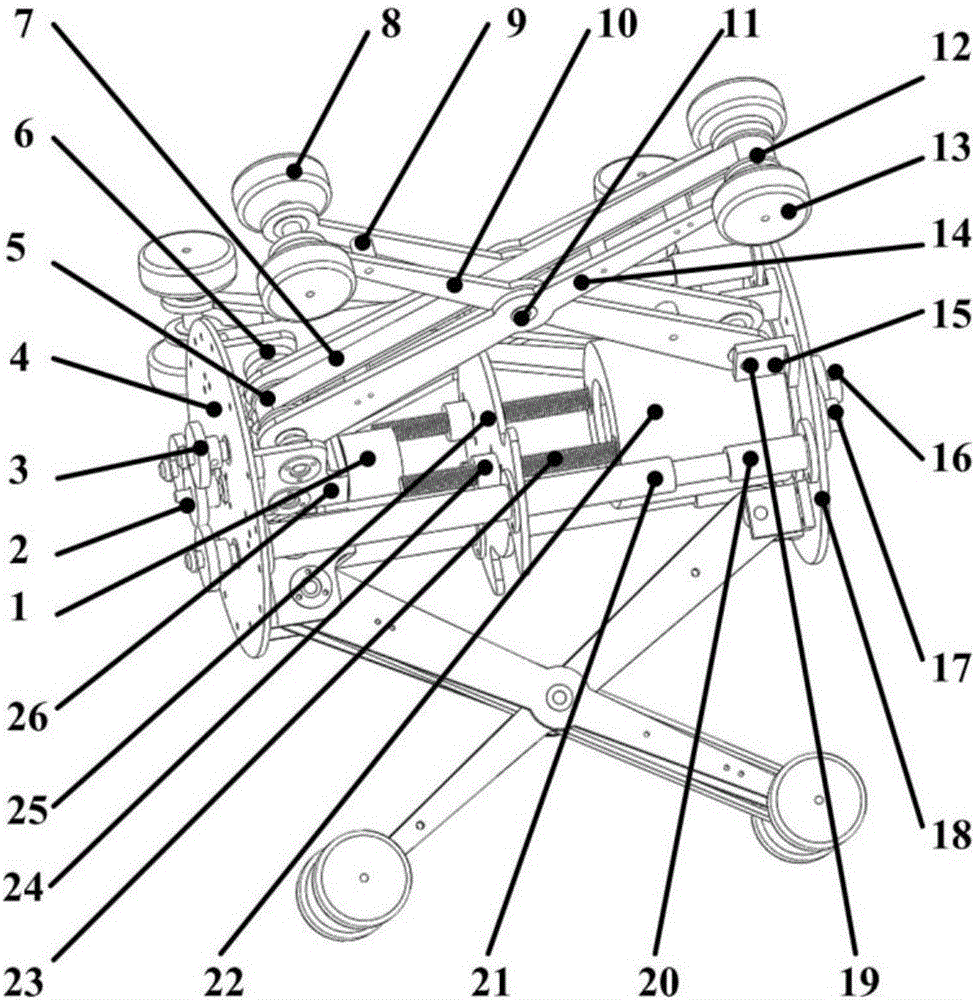
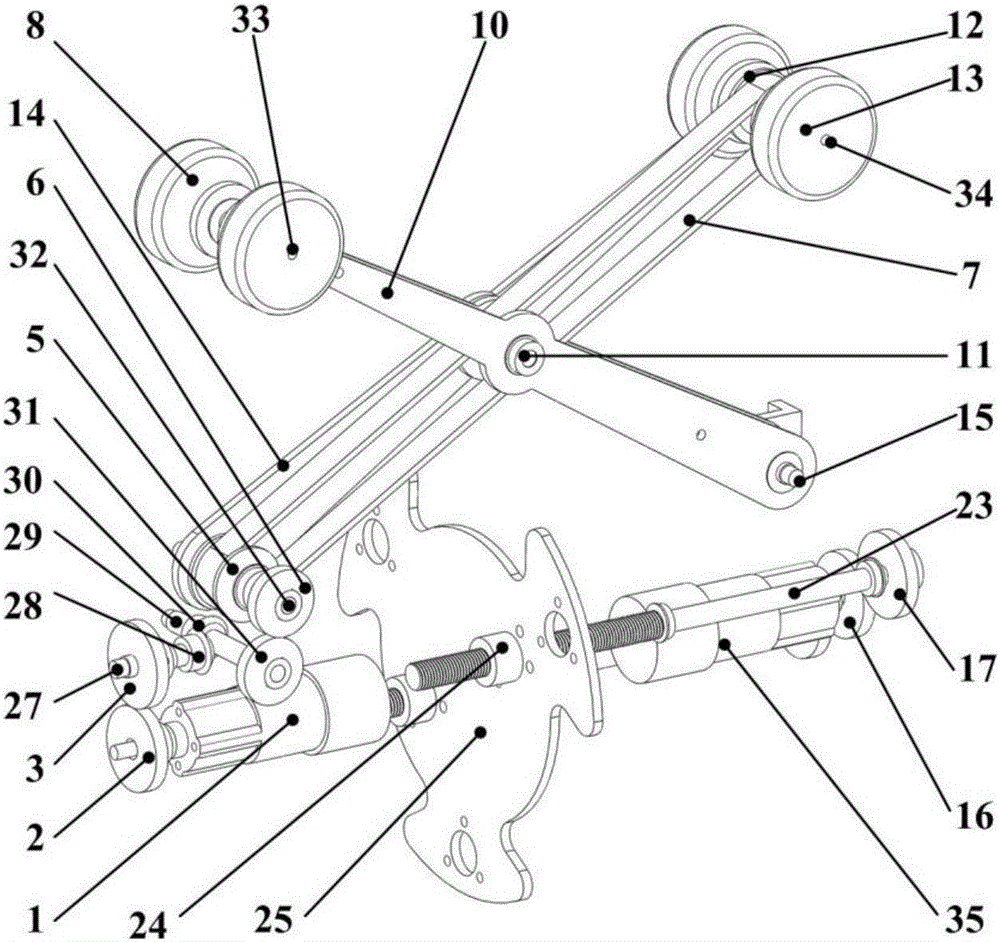
[0048] In this example, if figure 1 As shown, the portable large-diameter full-drive pipeline robot provided in this embodiment includes: a walking motor 1, a motor main gear 2, a motor slave gear 3, a front plate 4, a main pulley 5, a rocker arm slave gear 6, and a synchronous Belt 7, passive travel wheel 8, limit column 9, rear rocker arm 10, pin 11, slave pulley 12, active travel wheel 13, front rocker arm 14, rear rocker arm support plate 15, v...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More