

Multi-functional and one-stop type remote control design, the simulation system and method thereof
A technology of remote operation control and simulation system, which is applied in the field of multi-functional one-stop remote operation control design and simulation system, and can solve the problems of low operation accuracy of the end of a remote manipulator, inability to connect the two, and inconvenient operation methods.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
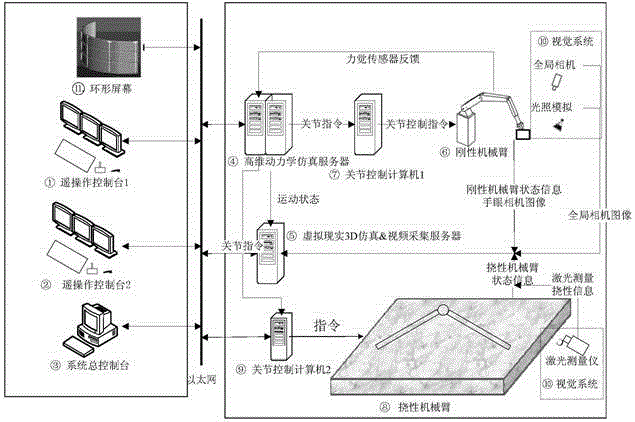
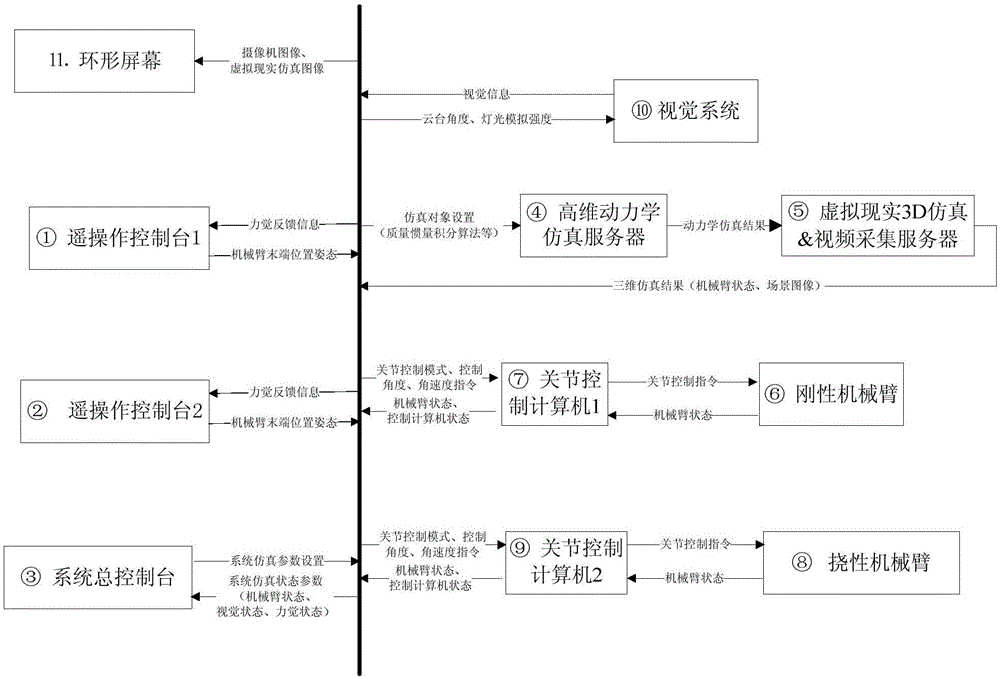
[0043] Such as figure 1 As shown, the multifunctional teleoperation control system uses the bus information architecture to organize the various parts of the teleoperation control system into a network, including the following components: the first teleoperation console 1; the second teleoperation console 2, the system Main console 3, high-dimensional dynamics simulation server 4, virtual reality 3D simulation and video capture server 5, rigid manipulator 6, first joint control computer 7, flexible manipulator 8, second joint control computer 9, vision system 10. Ring screen 11. The flow of information exchanged between devices through the bus is such as figure 2 Shown.
[0044] The system master console 3 is the maintenance and control platform of the entire system, which can provide monitoring, maintenance, and emergency stop operations for the entire system.
[0045] The first teleoperation console 1 and the second teleoperation console 2 achieve two functions: one is to take ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More