

Road boundary point automatic extracting and vectorizing method based on on-vehicle laser scanning data
A vehicle-mounted laser scanning and automatic extraction technology, applied in measuring devices, height/level measurement, instruments, etc., can solve the problems of low road ridge accuracy, low degree of automation, lack of applicability, etc., and achieve fast and robust extraction and vectorization , Improve production efficiency, improve the effect of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
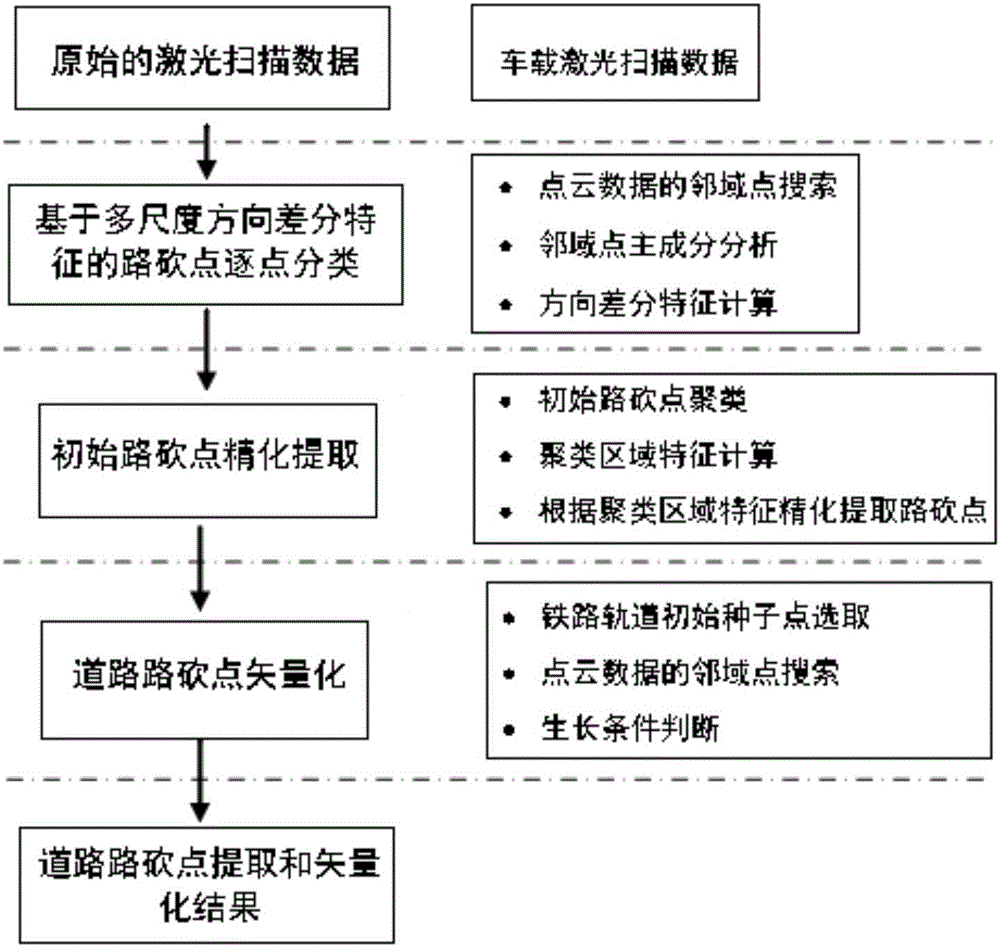
[0047] The technical scheme of the present invention adopts computer software to support the automatic operation process, and its process is as follows: figure 1 shown. The technical solution of the present invention will be described in detail below in conjunction with the embodiments and accompanying drawings. Implementation example Carry out road sill point extraction and vectorization according to the designed scheme, and the step-by-step detailed instructions are as follows:
[0048] Step 1. Calculate the features of each laser foot point in the 3D laser point cloud data.
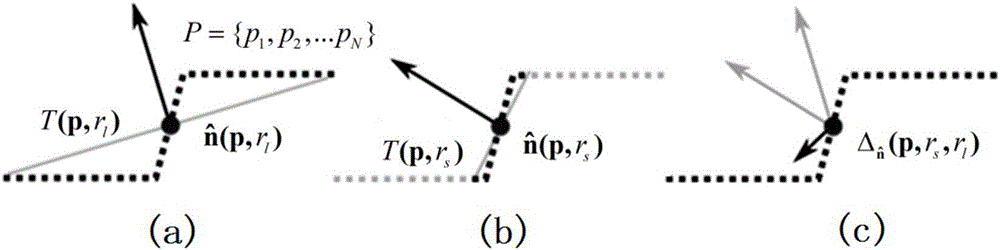
[0049] For any laser foot point pt, the implementation of multi-scale direction difference feature calculation is as follows:
[0050] Step 1.1: Parameter initialization:
[0051] Initialize the small neighborhood radius r based on experience small = 0.3m and large neighborhood radius r large =0.5m
[0052] Step 1.2: Take the laser foot point pt as the center of the sphere, and take r small and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More