

Real-time object detection method based on combination of three-dimensional point cloud segmentation and local feature matching
A three-dimensional point cloud and local feature technology, applied in computer parts, character and pattern recognition, instruments, etc., can solve problems such as unsatisfactory results, and achieve the effect of good image recognition, simple calculation, and fast processing speed.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
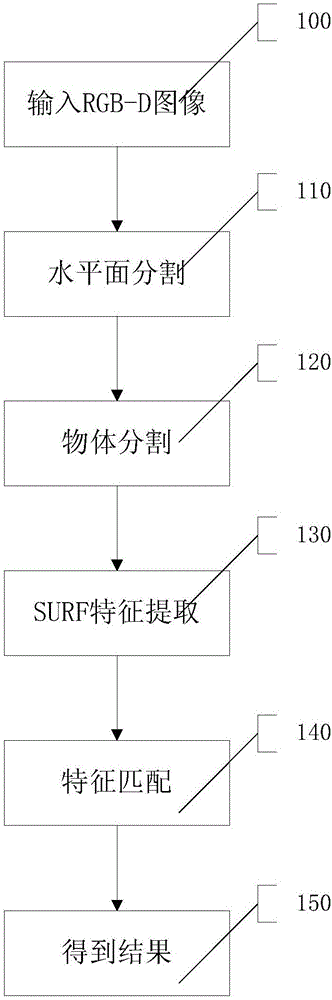
[0047] In view of the shortcomings of previous methods and the needs of service robots in practical applications, this paper proposes a real-time object recognition method that combines 3D point cloud and color image processing, through the rapid segmentation of 3D point cloud to achieve object detection and positioning, and uses The method based on SURF feature matching realizes the recognition of the target object. Taking advantage of the complete structural characteristics of ordered point cloud data, a method combining integral images and region growing is proposed to achieve faster 3D object detection. This method performs special matching in two steps, and the input is a 3D point cloud and a color image, which is divided into two steps. The first step is to realize object detection. Since robot-operable objects (such as drinks, cups, pen holders, etc.) in indoor environments are usually placed on horizontal surfaces such as tables and shelves, we first segment these hori...
Embodiment 2
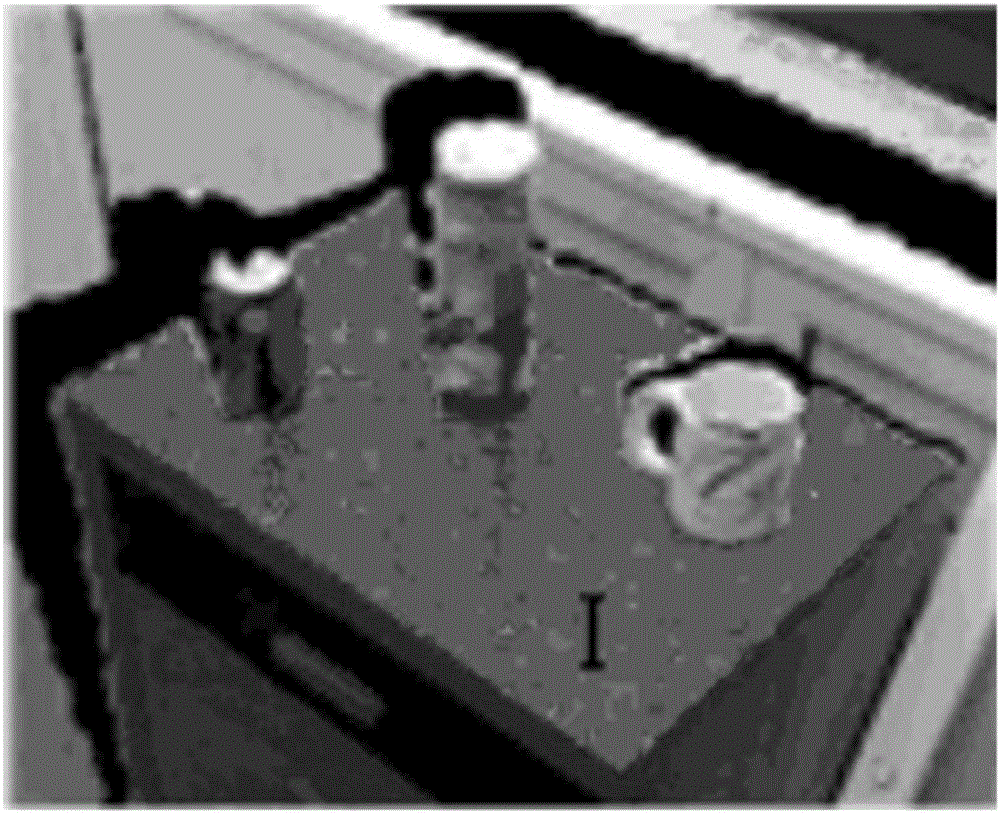
[0063] Such as figure 2 , 2a , 2b, 2c, 2d, 2e, figure 2 There are three barrel-shaped objects with different designs and colors in the picture, one is a red coke can with patterns, one is a blue potato chip barrel with patterns, and the other is a water glass with a handle and a white bottom with curved patterns. The first step is to carry out horizontal clustering, and the figure 2 The RGB-D original image shown in is segmented horizontally to obtain Figure 2a , first make sure that the three barrel-shaped objects are on the same horizontal plane I. The second step is to perform object clustering, and the Figure 2a The image shown in the object segmentation, get Figure 2b , remove the scenery around the three barrel-shaped objects, keep only the three barrel-shaped objects, extract the background color, pattern and whether there are protrusions on each barrel-shaped object, that is, the characteristics of the object, and store it in the feature library . Step thr...
Embodiment 3
[0065] Such as image 3 As shown in , in the 3D point cloud of the image, I represents a segmented horizontal plane, II represents the boundary of the horizontal plane, and III represents the point cloud of three objects on the horizontal plane.
[0066] Such as Figure 3a shown, given image 3 The point cloud segmentation results of three objects at III on the horizontal plane at I. Among them, IV represents three separate object clusters that are separated from each other.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More