

A method for quantitative determination of dynamic stability of multi-legged robots based on a foot force estimation algorithm
A dynamic stability, multi-legged robot technology, applied in the direction of motor vehicles, instruments, adaptive control, etc., can solve the problems of easy damage, high price of multi-dimensional force sensors, and inability to detect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
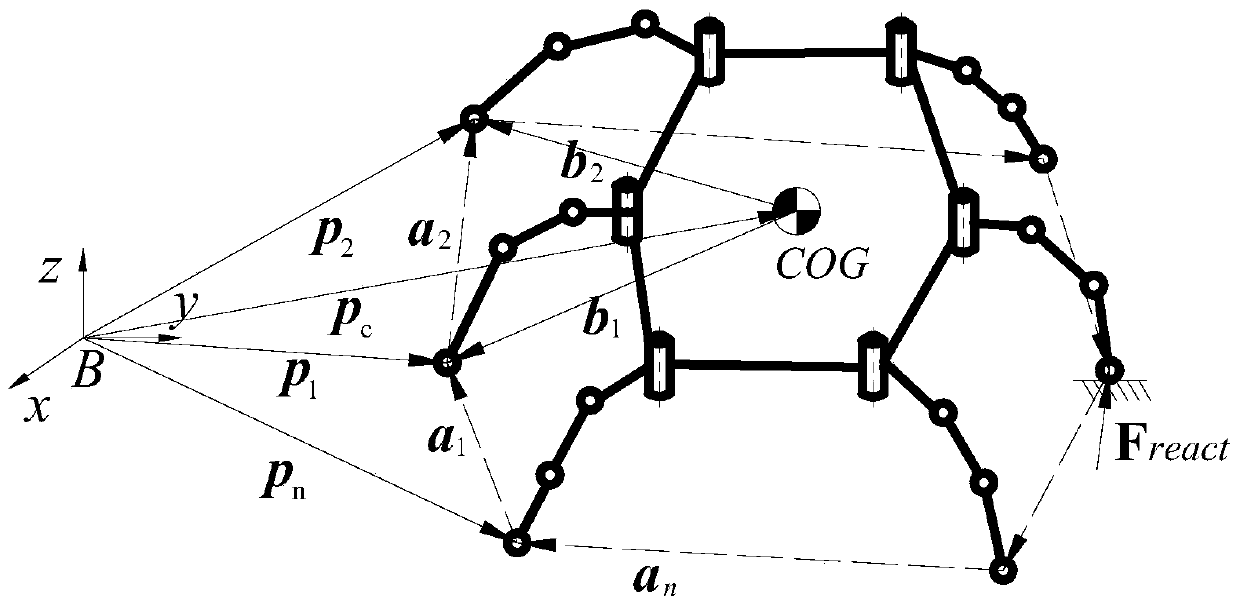
[0021] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto. This specific embodiment selects the hexapod series robot (such as figure 2 shown) as the object of action, but the implementation object is not limited to this, quadruped, eight-legged or parallel robots are also applicable.
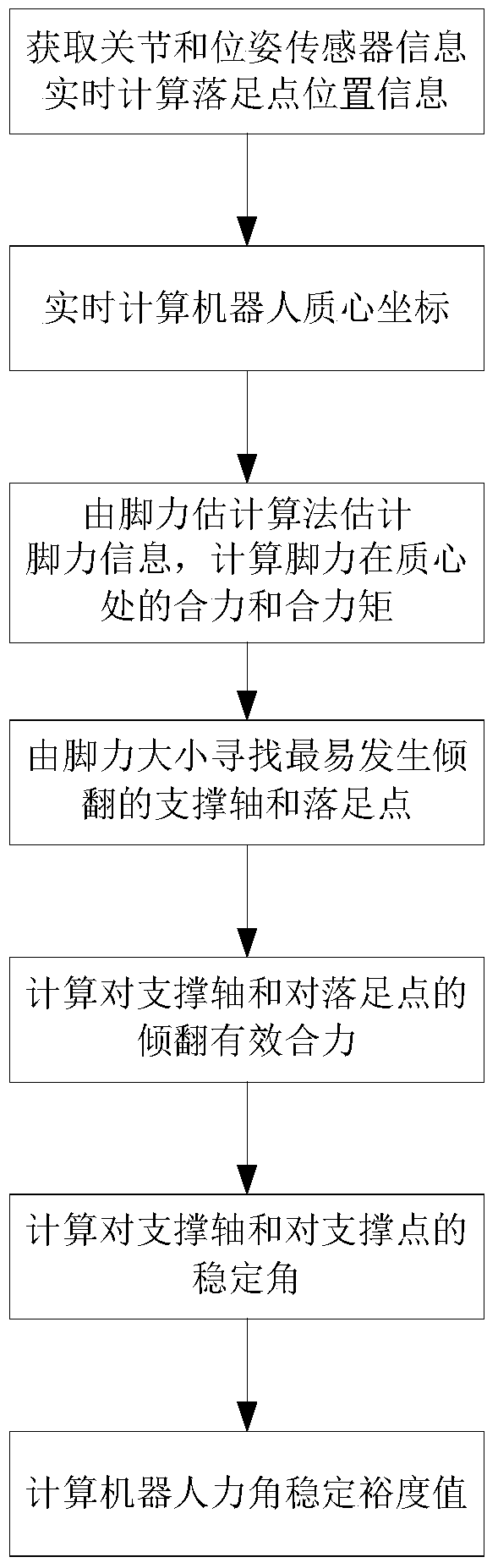
[0022] Such as figure 1 As shown, a kind of method for quantitatively determining the dynamic stability of a multi-legged robot based on the leg force estimation algorithm provided by the examples of the present invention includes the following steps:
[0023] Step 1: Obtain joint angles and body pose information in real time, and use these information to perform forward kinematics calculations on the robot to obtain the coordinates of the center of mass of each component of the robot in the reference coordinate system and the coordinates of the e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More