

Multi-angle consistent plane detection and analysis method for monocular video scene three dimensional structure
A technology for video scenes and three-dimensional structures, applied in the fields of computer vision technology, three-dimensional reconstruction, and augmented reality, which can solve problems such as high computing power requirements, no consideration of the existence of the three-dimensional structure, and inability to obtain the three-dimensional structure of the scene
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
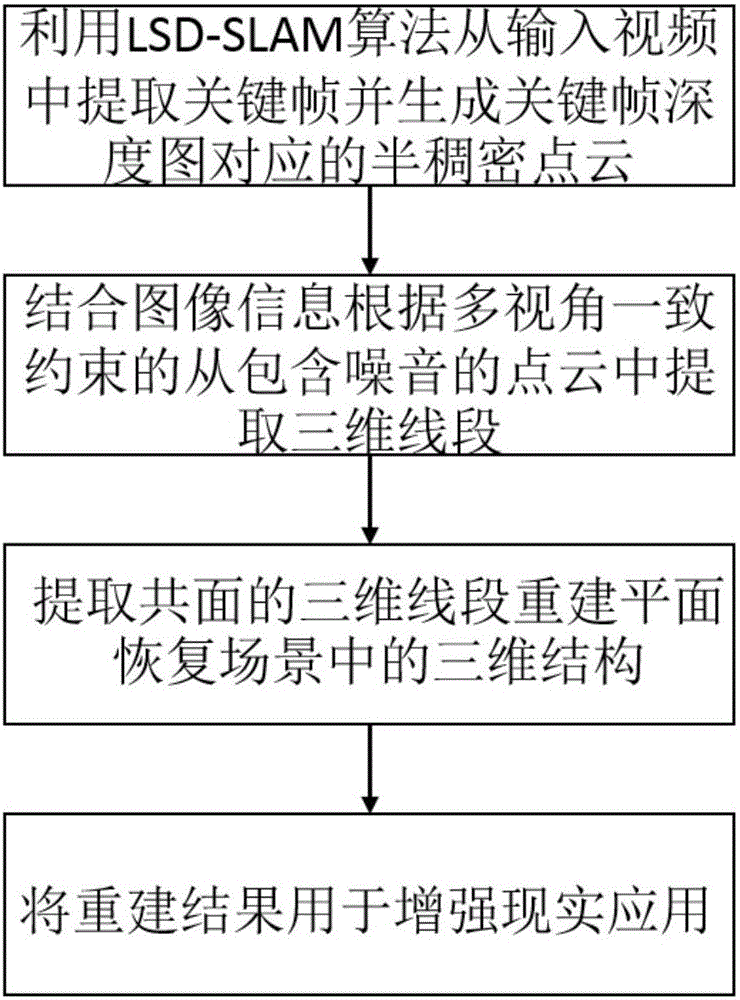
[0061] Such as figure 1 As shown, the multi-view consistent plane detection and analysis method of the three-dimensional structure of the monocular video scene of the present invention comprises the following steps:
[0062] In step S100, the user first calibrates the camera in advance to obtain parameters such as the focal length, principal point, and distortion of the camera, and then de-distorts the captured video. Convert each frame image of the input video from an RGB image to a grayscale image, and then use LSD-SLAM to detect points with strong gradient changes in the image, and calculate the camera pose increment of adjacent frames by direct image alignment; use Triangulation technology calculates the depth of these points with strong gradient changes. The depth of these points constitutes a depth map. Using the depth map, a point cloud containing noise can be generated, redundant frames are removed, and only the key frames and key frame depths of the retained video are...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More