

Method for using robot to real-time and dynamically position and monitor indoor object based on RFID
A real-time dynamic positioning, RFID tag technology, applied in the field of communication, can solve the problems of high computational complexity, high cost, low real-time performance, etc., and achieve the effect of large transmission range, low equipment cost, and strong scalability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment 1
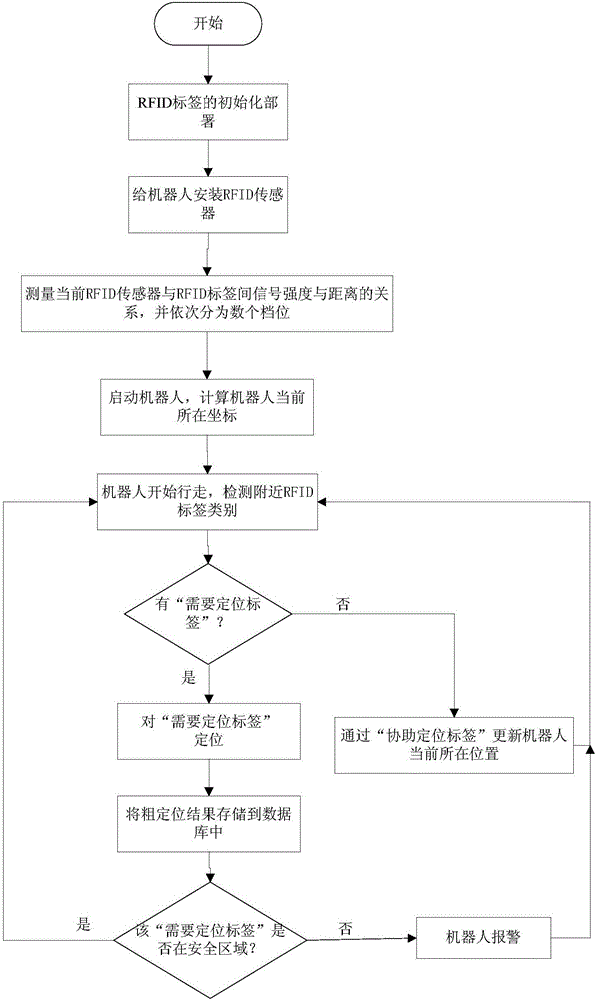
[0034] The present invention provides an RFID-based robot real-time dynamic positioning and monitoring method for indoor targets, see figure 1 , the implementation process involves RFID positioning and indoor walking robots, based on the signal strength value of the RFID tag to realize the positioning and monitoring of the target body, specifically including the following steps:
[0035] 1) Perform initial deployment of RFID tags for indoor areas that need to be monitored. The specific steps include:
[0036] 1a) Classify the RFID tags, divide the RFID tags into categories with different attributes according to the different functions in dynamic positioning, and specifically divide them into two categories: "assisting positioning tags" and "needing positioning tags", among which "assisting positioning tags" It is used to assist the robot to locate itself, and the "Need to locate label" is carried on the person who needs to be located or attached to the object to be monitored f...
Embodiment 2
[0051] The RFID-based robot real-time dynamic positioning and monitoring method for indoor targets is the same as in Embodiment 1, and the RFID tag is a coded electronic tag. The present invention encodes the RFID tag in step 1b), see figure 2 and image 3 , including:
[0052] 1b.1) The first byte of the RFID tag stores the ID number of the tag, supporting 256 tags.
[0053] 1b.2) The second byte is the label category attribute code, which is coded according to different label categories. The content of this byte indicates that it is either "assist to locate the label" or "need to locate the label", such as: 1111 Denotes "Assist in Locating Labels", see figure 2 , 0000 means "Need to locate the label", see image 3 .
[0054] 1b.3) Starting from the third byte, corresponding to the tag type, the corresponding positioning information is stored respectively.
[0055] In order to mark the specific positioning coordinates, a planar rectangular coordinate system is establis...
Embodiment 3
[0060] The RFID-based robot is the same as embodiment 1-2 to the real-time dynamic positioning and monitoring method of the indoor target body, the location of the location of the "need to locate the label" described in step 7) and step 8) of the present invention is, where the current robot is located The exact coordinates are the center, and the distance R between the robot and the tag is the radius. The value of R here is not an exact value, but a data range.
[0061] In the overall design, the present invention adopts the positioning scheme of "need to locate the label", specifically in step 7) measure the signal strength of the "need to locate the label" by the RFID reader, and judge the distance of the label according to the signal strength gear The distance range of the robot, combined with the precise position coordinates of the robot itself, realizes the positioning of the location of the "need to locate the label"; the location result of the location of the "need to l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More