High-precision automatic robot welding device and working method thereof
An automatic welding and robot technology, applied in the field of grid plates, can solve the problems affecting the quality of welding, difficult to complete the process, cumbersome operation, etc., to improve the accuracy of detection, solve the placement problem, and simplify the working process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
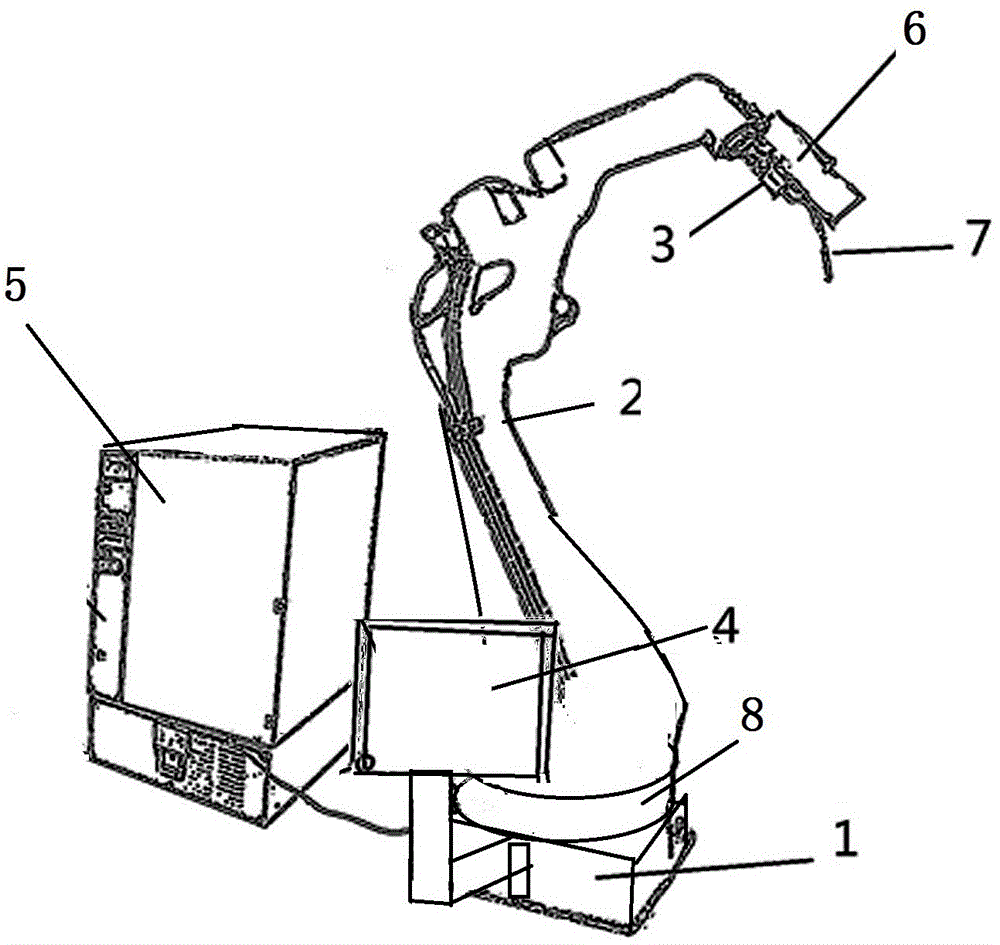
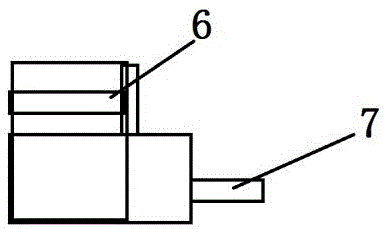
[0042] Such as Figure 1 to Figure 3 A high-precision robotic automatic welding device shown includes: a base 1, a mechanical arm 2, a wrist joint 3, a touch screen 4 and a control device 5, and the wrist joint 3 is provided with a laser detector 6 and a welding torch 7;
[0043] The relationship between the above components is as follows:
[0044] Wherein, the mechanical arm 2 is set on the base 1, the wrist joint 3 is set at the end of the mechanical arm 2, the touch screen 4 is set on the support frame of the base 1, the mechanical arm 2, wrist The joint 3, the touch screen 4 and the laser detector 6 are all connected to the control device 5, the control device 5 is provided with an electric control box, and the detection range of the laser detector 6 is greater than or equal to the required welding edge of the grid plate width.
[0045] In this embodiment, the wrist joint 3 is provided with an installation base, and the installation base is in an inverted L shape. The in...
Embodiment 2
[0054] Such as Figure 1 to Figure 3 A high-precision robotic automatic welding device shown includes: a base 1, a mechanical arm 2, a wrist joint 3, a touch screen 4 and a control device 5, and the wrist joint 3 is provided with a laser detector 6 and a welding torch 7;
[0055] The relationship between the above components is as follows:
[0056] Wherein, the mechanical arm 2 is set on the base 1, the wrist joint 3 is set at the end of the mechanical arm 2, the touch screen 4 is set on the support frame of the base 1, the mechanical arm 2, wrist The joint 3, the touch screen 4 and the laser detector 6 are all connected to the control device 5, the control device 5 is provided with an electric control box, and the detection range of the laser detector 6 is greater than or equal to the required welding edge of the grid plate width.
[0057] In this embodiment, the wrist joint 3 is provided with an installation base, and the installation base is in an inverted L shape. The in...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More