Six-freedom-degree robot track planning method giving consideration to tail end motion error
A technology of motion error and trajectory planning, applied in the direction of instruments, manipulators, adaptive control, etc., can solve the problems of reducing planning efficiency, continuous trajectory tracking error cannot be controlled, and it is difficult to reflect the real function of interpolation algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
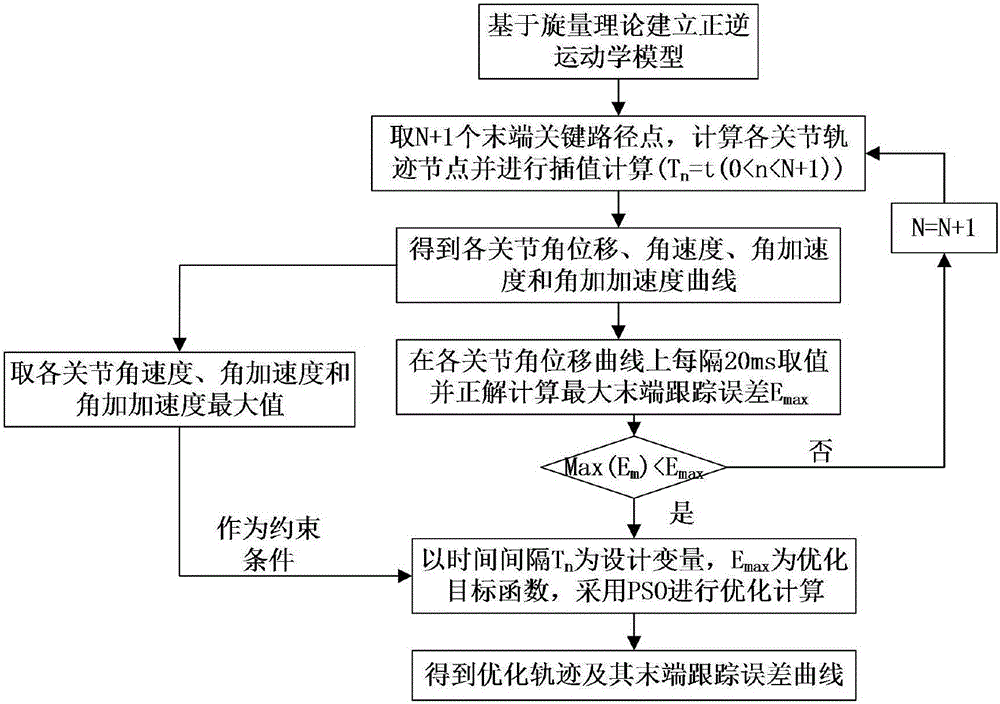
[0016] Step (1) Establish the forward and inverse kinematics model of the robot based on the screw theory
[0017] positive kinematics model
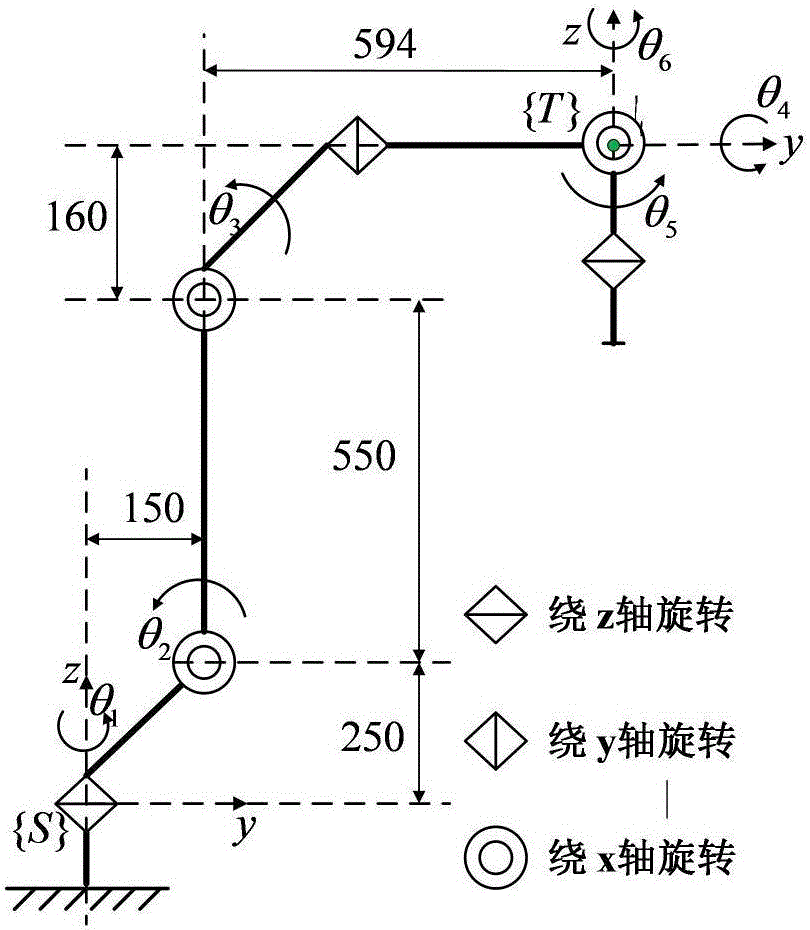
[0018] like figure 2 shown, the position vector r of the i-th joint of the robot in the initial state is known i and the rotation vector ω i as follows:
[0019]
[0020]
[0021] According to the screw theory, the transformation matrix between joints is expressed in the form of exponential product,
[0022]
[0023] in the formula Represents the i-th joint screw, θ i is the angular displacement of the i-th joint; by ω i =[ω 1 ω 2 ω 3 ]defined as but n i is the rotational linear velocity of the i-th joint motion, ν i =-ω i ×r i .
[0024] Then the positive kinematics model g of the robot st (θ) is represented as follows:
[0025]
[0026] Inverse kinematics model
[0027] This method transforms the solution of each joint angle into three Paden-Kahan subproblems, since the position of the robot end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com