

Height control method and height control system for aerial vehicle
A technology for altitude control and aircraft, applied in the field of flight control, can solve problems such as data instability, susceptibility to external environment interference, and low sensor accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0068] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
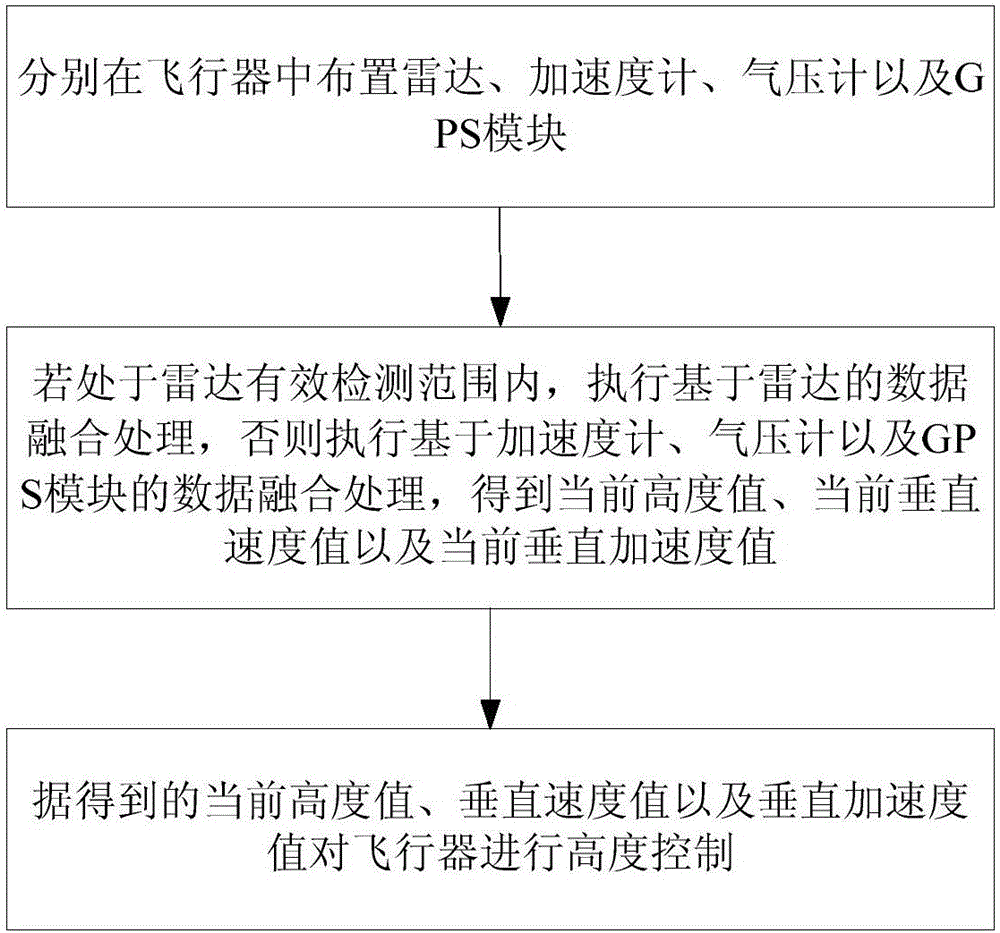
[0069] Such as figure 1 As shown, the present embodiment is used for the altitude control method of the aircraft, and the steps include:
[0070] 1) Arrange radar, accelerometer, barometer and GPS module in the aircraft respectively;
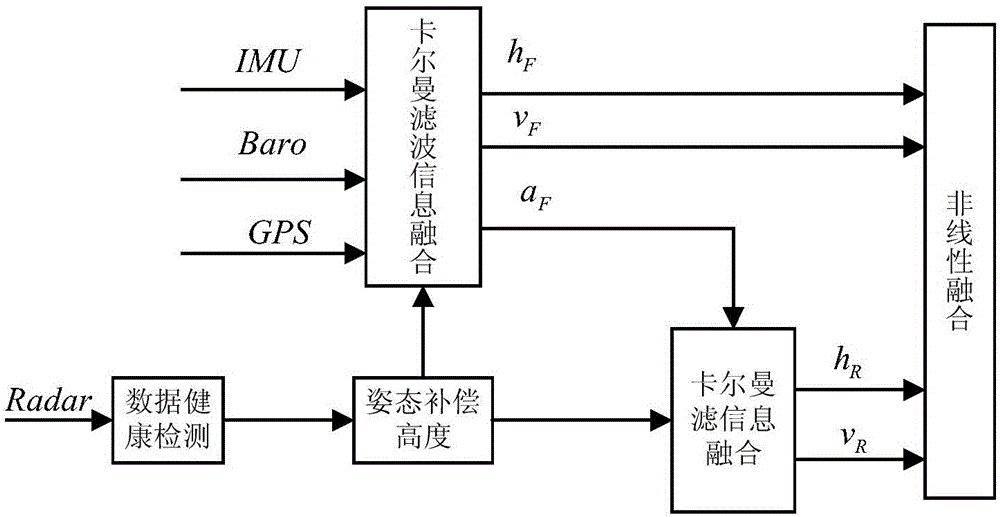
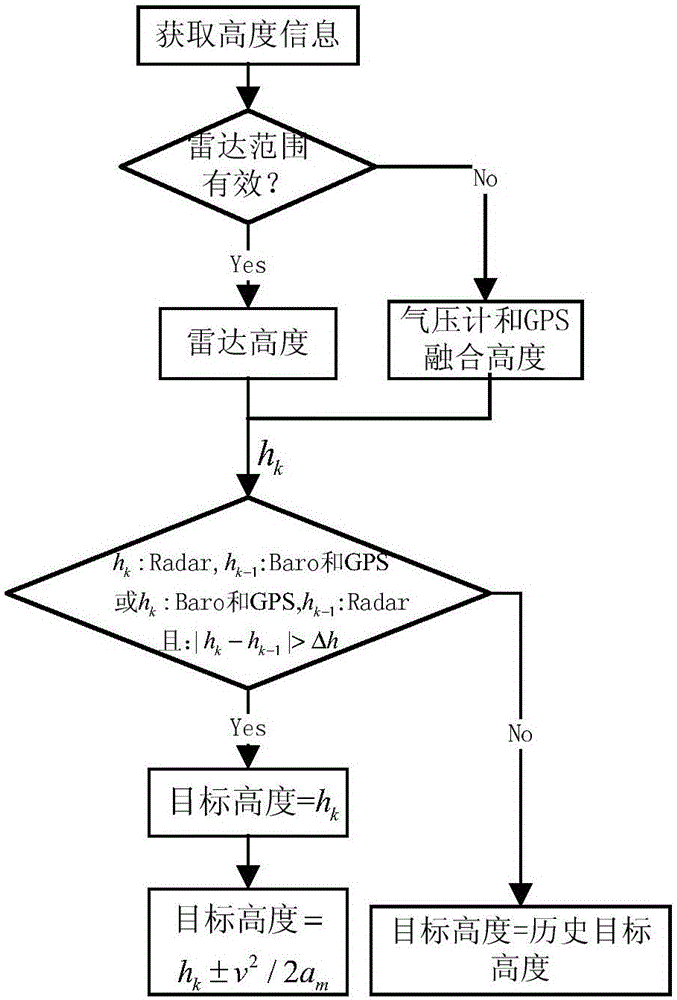
[0071] 2) During the flight of the aircraft, if it is within the effective detection range of the radar, the data fusion processing based on the radar is performed, and the information detected by the radar, accelerometer, barometer and GPS module is first obtained for fusion, and the fusion result is then combined with the information detected by the radar Perform fusion to obtain the fusion result; otherwise, perform data fusion processing based on the accelerometer, barometer and GPS module to obtain the fusion result; obtain ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More