

Nonlinear inverse control method used for dynamic hysteresis compensation of piezoelectric actuator
A piezoelectric driver, non-linear technology, applied in general control systems, adaptive control, control/regulation systems, etc., can solve the problems affecting the precision positioning accuracy, affecting the positioning accuracy of piezoelectric drivers, etc., to achieve high positioning accuracy, structural Simple, good tracking performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] Attached below Figure 1-4 The specific embodiments of the present invention will be further described.
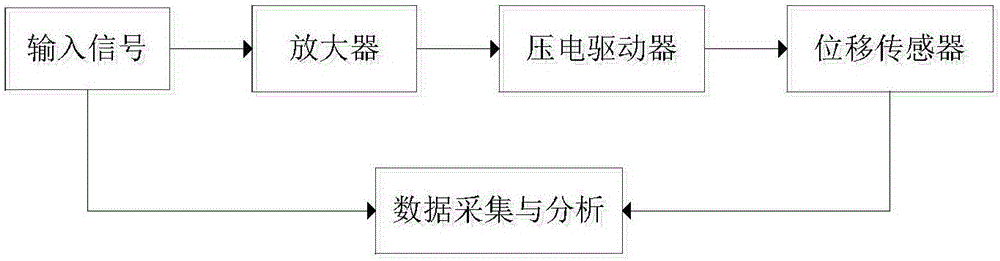
[0018] as attached figure 1 Shown is the schematic diagram of the experimental setup for the hysteresis characteristics of the piezoelectric driver.
[0019] Piezoelectric ceramics with hysteresis characteristics are selected as the research object, including signal generators, power amplifiers, laser displacement sensors, and data acquisition and analysis devices. The signal generator generates the input signal and stores it in the data acquisition and analysis device. The data acquisition and analysis device receives and saves the input signal generated by the signal generator and the displacement signal output by the displacement sensor, and performs data processing to draw a hysteresis curve. The power amplifier circuit can amplify the low-voltage drive signal to tens of volts or even hundreds of volts, load it on both ends of the piezoelectric ceramic, and d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More