

A lumbar postoperative rehabilitation assisting robot
A robot and lumbar technology, applied in passive exercise equipment, physical therapy, etc., can solve problems affecting the quality of treatment and rehabilitation of lumbar diseases, increase the risk of disease recurrence, slow recovery of lumbar diseases, etc., and achieve effective safety protection capabilities , improve the flexibility of the waist, and avoid the effect of aggravating the condition
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific embodiments.
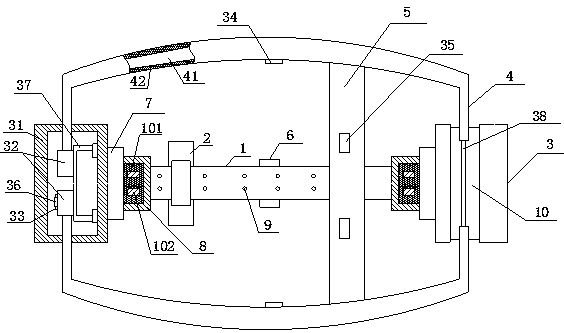
[0014] Such as figure 1 The postoperative rehabilitation assistant robot of the lumbar spine comprises a positioning belt 1, a control device 2, an adjustment mechanism 3, a bearing rod 4 and an elastic reset belt 5, and the positioning belt 1 forms a closed loop structure through at least one positioning buckle 6, and the positioning The waist belt 1 comprises an elastic covering base material 101, an elastic metal strip 102 and a positioning buckle 6, at least two elastic metal strips 102 are distributed parallel to each other, and each elastic metal strip 102 is embedded in the elastic covering base material 101 and is connected with the elastic The coated base material 101 is distributed parallel to the axes. The elastic coated base material 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More