

Light rail robot four-wheel-drive motion control system and method thereof
A technology of motion control system and rail robot, which is applied in the direction of program control of manipulators, manipulators, manufacturing tools, etc., can solve the problems of insufficient driving force, unbalanced driving force, and low energy efficiency utilization rate of tunnel inspection robots, so as to improve energy efficiency utilization rate effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
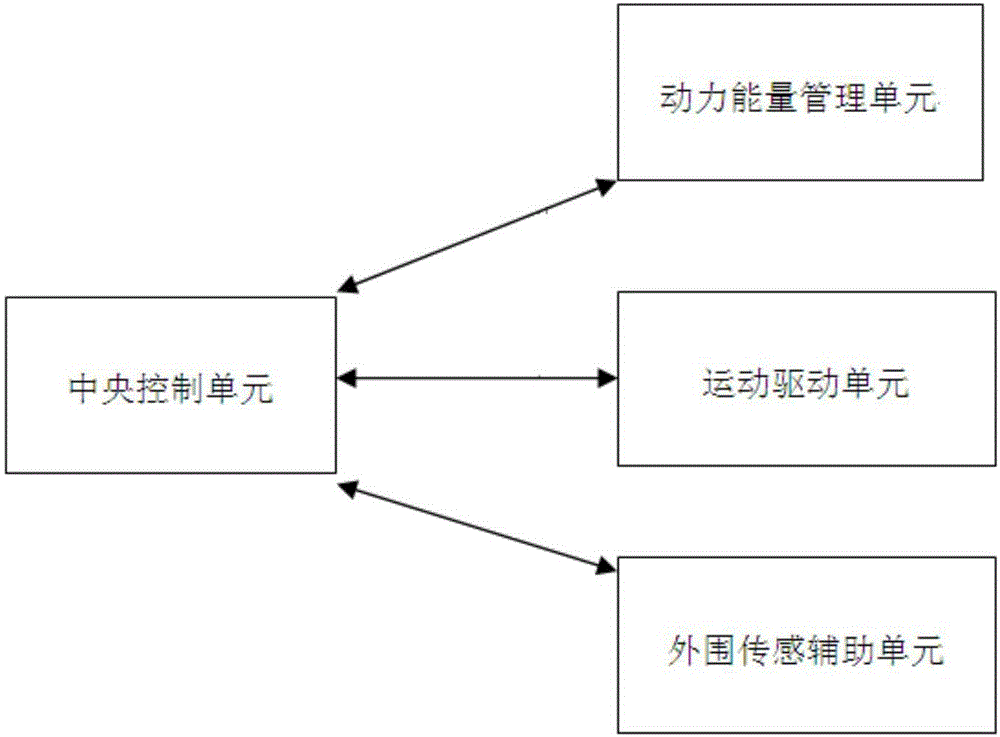
[0043] Such as figure 1 As shown, a four-wheel drive motion control system for a light rail robot consists of four parts: a central control unit, a power energy management unit, a motion drive unit, and a peripheral sensing auxiliary unit.
[0044] The central control unit is the core of the system. It manages and controls the motion drive unit and the power energy management unit. At the same time, it receives the feedback information from the peripheral sensing auxiliary unit and adjusts the control parameters of the motion drive unit in real time to realize the safe and stable operation of the system. Management unit power control and feedback, reasonably adjust the load balance of the motion drive unit.
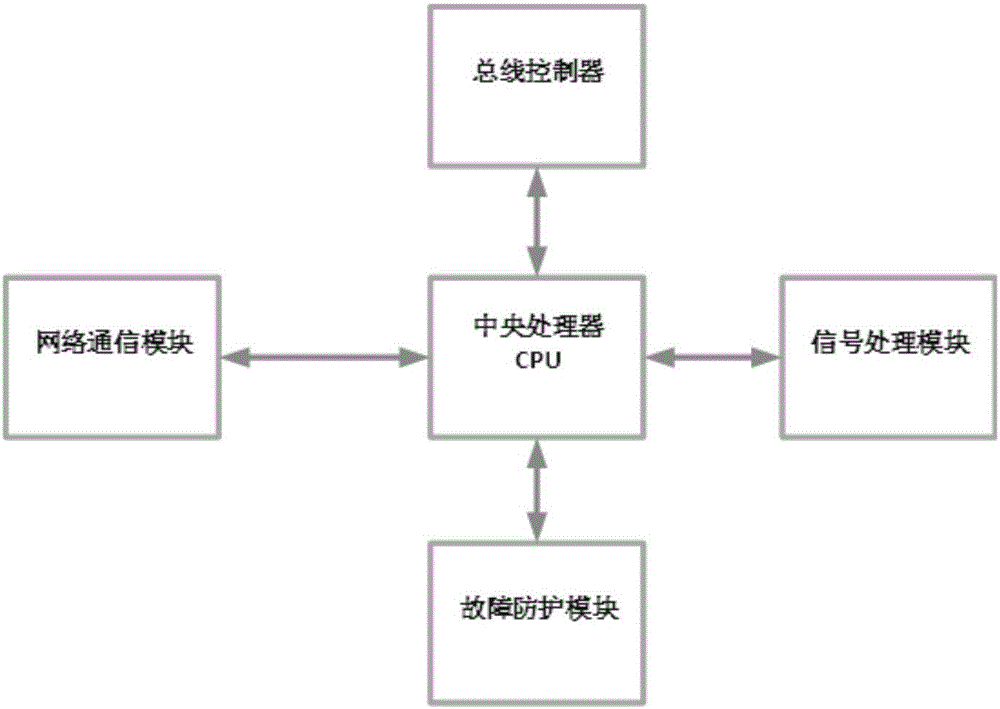
[0045] The structure of the central control unit is as figure 2 As shown, it includes a CPU central processing unit and a network communication...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More