Multi-robot collaborative transportation method
A collaborative transportation and multi-robot technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems such as insufficient PL energy, excessive energy redundancy, and inability to complete tasks, so as to reduce special space requirements and increase storage density. , The effect of reducing the difficulty of Pa collaborative work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0051] Example 1: No host case
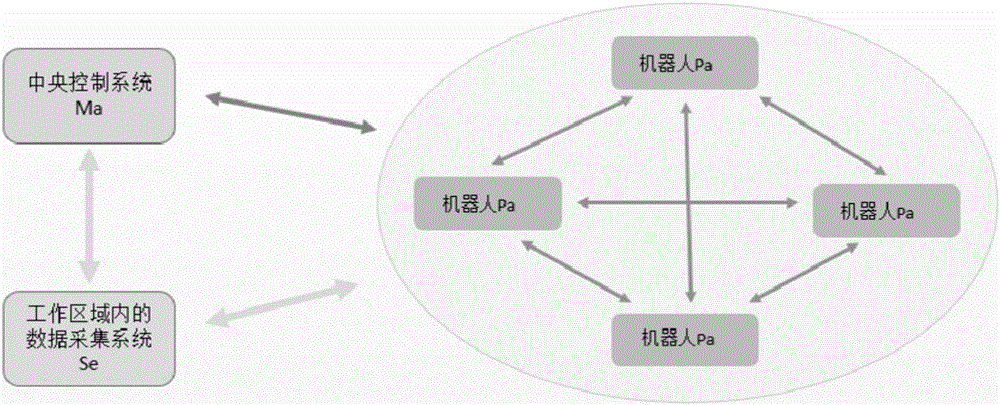
[0052] 1. When there is no central control system Ma. The work of Ma is undertaken by Pa with computing power. Pa can be one or more. Let Pa who undertakes the task of Ma be Pama. When only one bearer Ma is selected, the Pa with the best robustness is selected. When more than one can be selected, the operation method can be one of the following two forms: A: multiple Pa operations with the same data and content. B: Multiple Pas perform distributed operations.
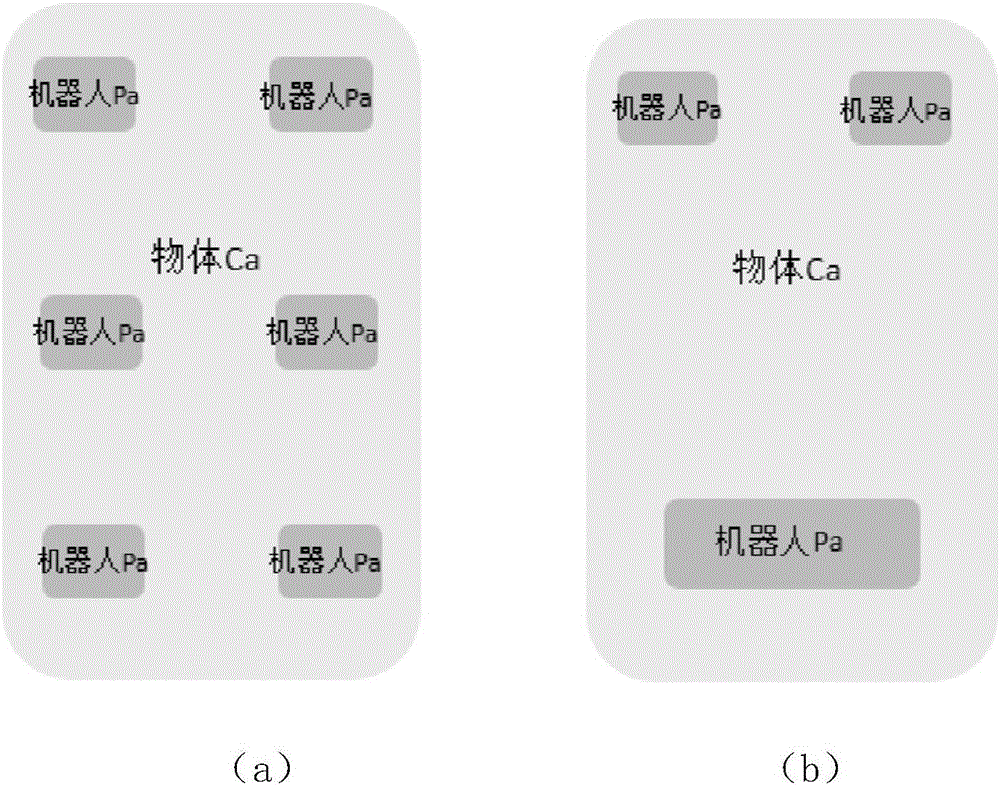
[0053] 2. The robot Pa or Se detects the target Ca parameters, and Pama judges the type and quantity of robot Pa needed to transport Ca.
[0054] The criteria for judging are as follows: (all must be met).
[0055] 1) Quantity judgment: Assume that there are n types of robots Pa, and the number of different types of robots is represented by Pa1, Pa2...Pan. Assume that the mass of the target object Ca is Mca, and the payloads of the robots Pa1...Pan are Mpa1...Mpan respectively. T...
Embodiment 2
[0069] Example 2: Parking scene
[0070] 1. The whole includes the central control system Ma, multiple robots Pa, and the data acquisition system Se in the working area.
[0071] 2. The robot Pa or Se detects the Ca parameters of the target vehicle, and the central control system Ma judges the type and quantity of robots Pa needed to transport Ca.
[0072] The criteria for judging are as follows: (all must be met).
[0073] 1) Quantity judgment: Assume that there are n types of robots Pa, and the number of different types of robots is represented by Pa1, Pa2...Pan. Assume that the mass of the target object Ca is Mca, and the payloads of the robots Pa1...Pan are Mpa1...Mpan respectively. Then the number of multiple robots Pa used should satisfy the formula:
[0074] Pa1*Mpa1+Pa2*Mpa2+...Pan*Mpan≥Mca.
[0075] When n is 1, that is, only one kind of robot is selected, the number Pax of the robot and the payload Mpax of the robot satisfy the condition that Pax≥Mca÷Mpax.
[00...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More