

Shaft hole part positioning method based on cross laser device and machine vision
A cross laser and machine vision technology, applied in the field of automation, can solve problems such as low work efficiency, inability to quickly locate shaft-hole parts, and inability to determine the position of the grasped part and the position and posture of the installed part, etc., to achieve accurate The effect of handling and installation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
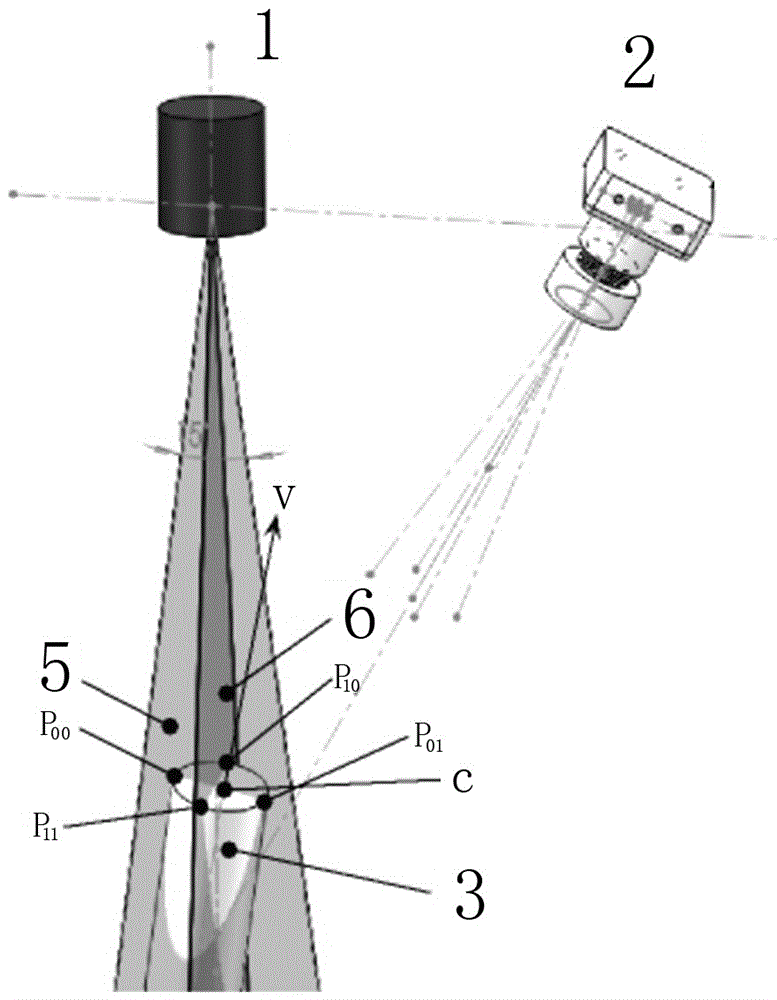
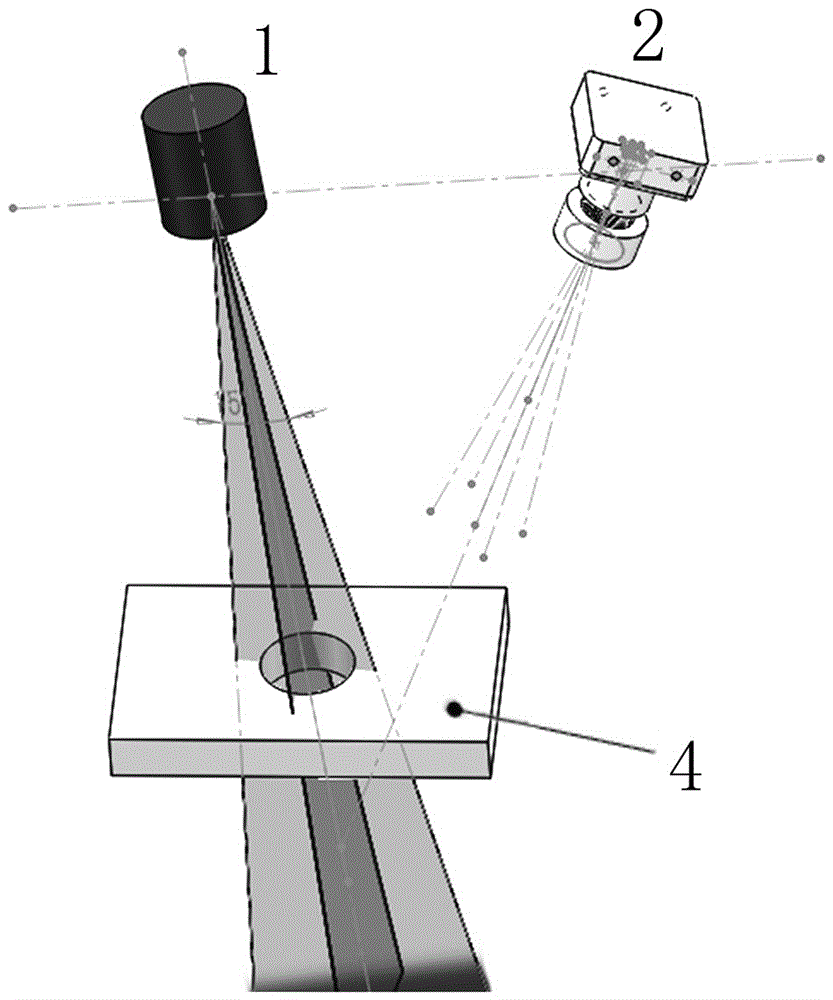
[0063] Such as Figure 1-2As shown, a positioning method for shaft-hole parts based on cross laser and machine vision includes laser 1, camera 2, and shaft-hole parts; laser 1 emits cross lasers to form two intersecting laser light planes to irradiate the shaft End faces of hole parts;
[0064] Shaft and hole parts are divided into shaft parts 3 and hole parts 4. The end face of shaft and hole parts is a space circle, the center is C, and the direction vector is V; the two intersecting laser light planes respectively include the first light plane 5. The second optical plane 6 and the first optical plane 5 cut the end face to form two characteristic breakpoints and , the second optical plane 6 cuts the end face to form two characteristic breakpoints and , are imaged by camera 2 respectively;
[0065] The positioning and attitude determination method specifically includes the following detection steps:
[0066] a) Contour feature point detection: use crosshair structur...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More