Bottom mud sampling robot
A robot and sediment technology, applied in the field of robots, can solve the problems of not being able to record the position of the collected samples, the degree of automation is not high, and the sampling effect is not good, so as to achieve the effects of convenient and fast sampling, improved safety, and novel structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solution of this patent will be further described in detail below in conjunction with specific embodiments.
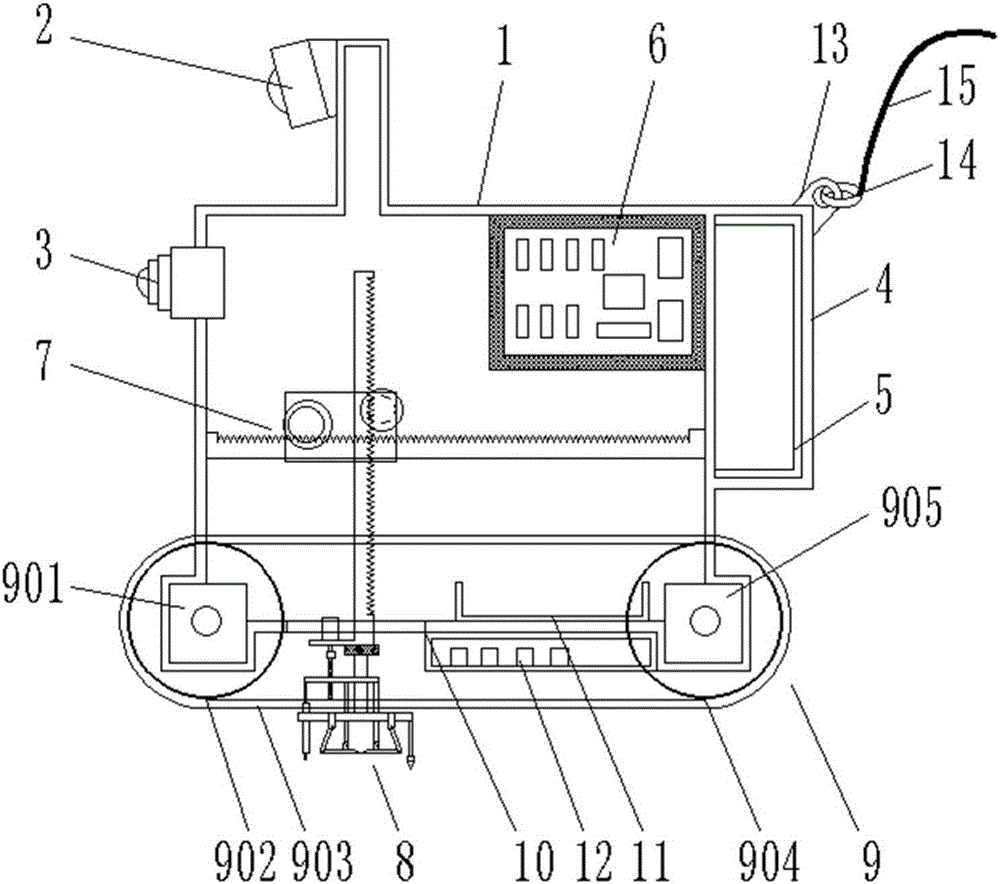
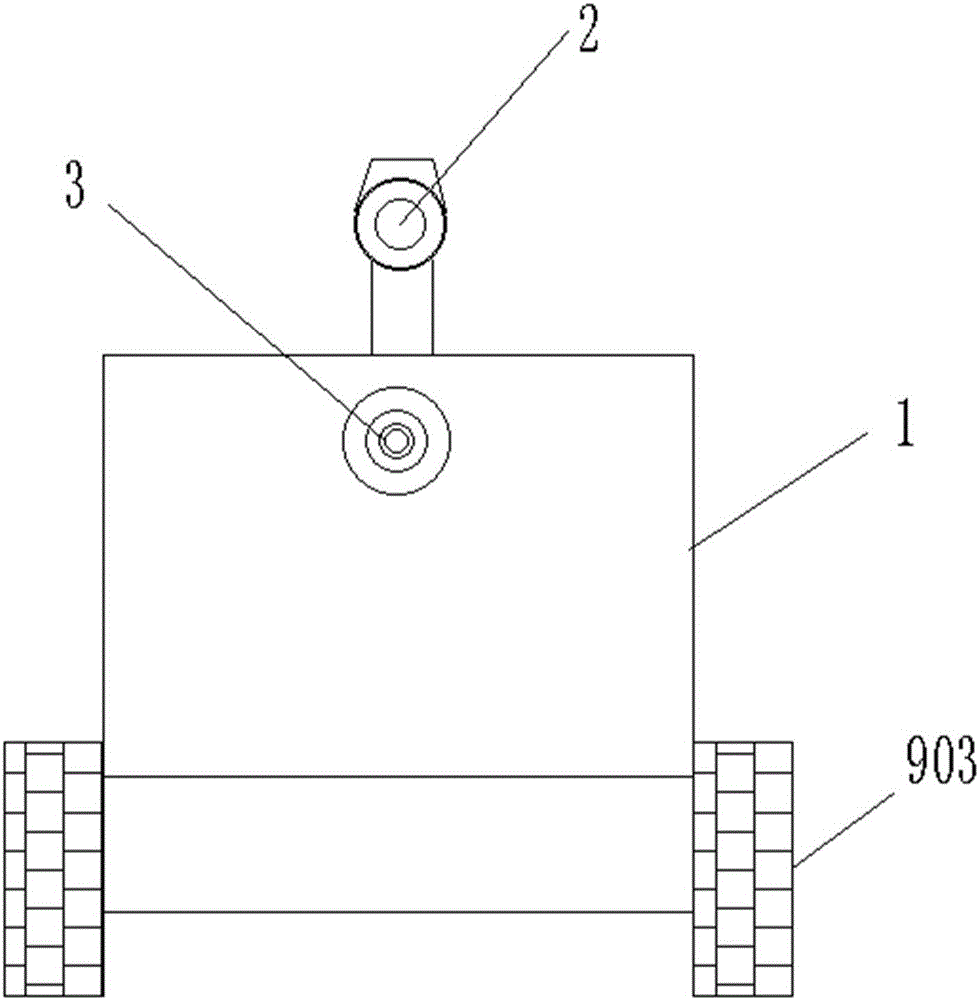
[0026] see figure 1 , in an embodiment of the present invention, a bottom mud sampling robot includes a housing 1, an illuminating lamp 2, a rotating camera 3, a battery sealing cover 4, a lithium battery 5, a control module 6, a truss module 7, a sampling detection module 8, and a drive module 9. Sampling port 10, sample loading box 11, weight adjustment module 12, traction seat 13, traction ring 14 and traction rope 15, an illuminating lamp 2 is installed above the casing 1, and a rotating shaft is installed above the front surface of the casing 1. Camera 3, the rear end surface of the rotating camera 3 is provided with a battery sealing cover 4, and a lithium battery 5 is installed inside the battery sealing cover 4;
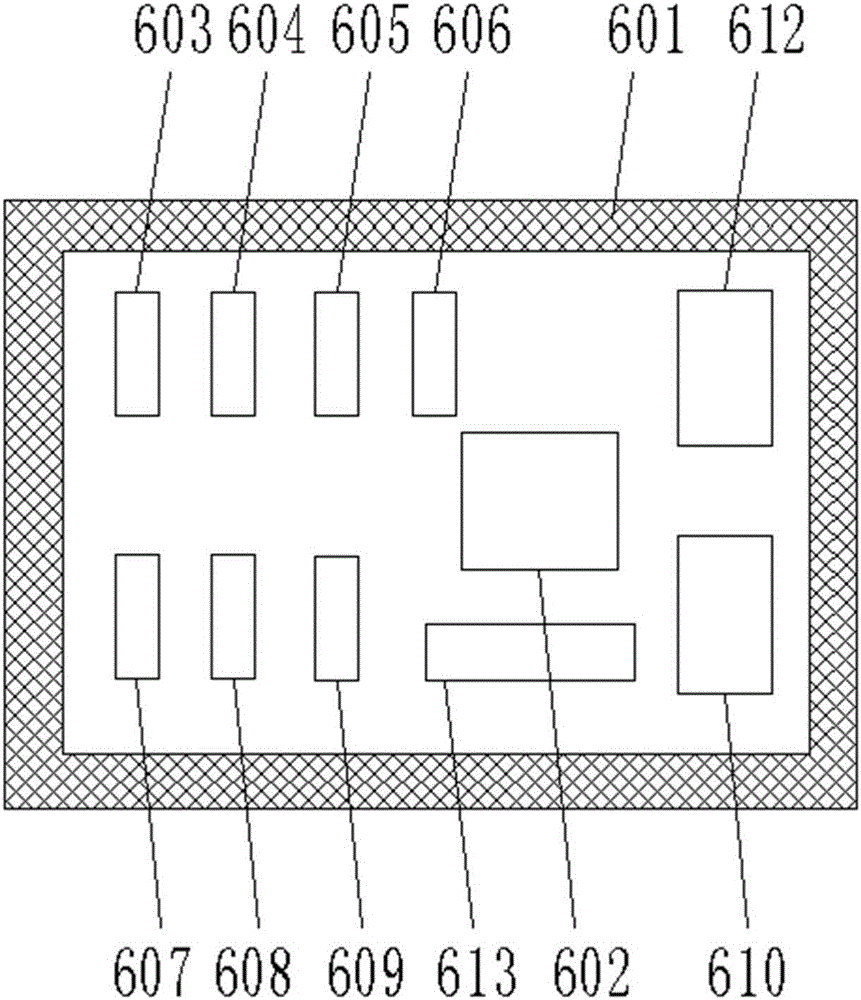
[0027] A control module 6 is installed on the left end surface inside the housing 1, and the control module 6 includes a sealed...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More