

Adaptive output feedback inverse control method for piezoelectric precision position platform
An output feedback and self-adaptive technology, applied in the field of precision machining and manufacturing, can solve the problems of inconvenient measurement, unobtainable and invalid speed and acceleration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0142] The present invention will be further described below using the accompanying drawings and examples.
[0143] The adaptive output feedback inverse control method of the piezoelectric precision position platform of the present invention includes the following contents:
[0144] 1) Mathematical model of piezoelectric precision position platform
[0145] Considering a class of nonlinear system with hysteresis added:
[0146]
[0147]
[0148] y=x 1 ,i=0,1,...,n-1 (1)
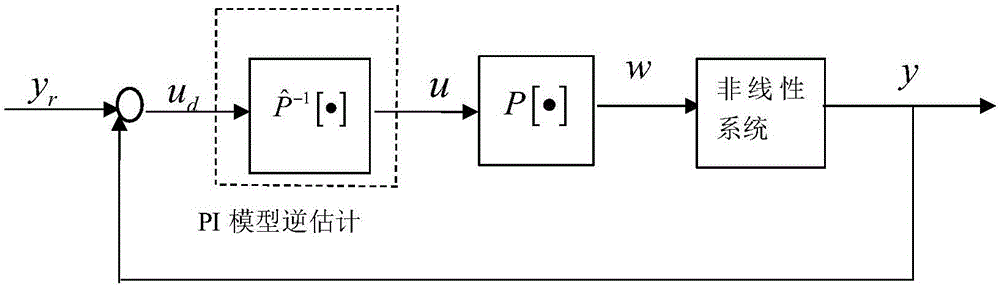
[0149] in, is the state vector; Unknown smooth linear function, d i (t) is the external disturbance, b 0 The unknown constant parameter, w∈R unknown hysteresis, is expressed as:
[0150] w(u)=P(u(t)) (2)
[0151] u is the input signal of the actuator, P is the lag operator,
[0152] For the system (1), the following assumptions are necessary:
[0153] A1: interference d i (t), i=1,···,n, satisfy:
[0154]
[0155] in, are some unknown normal constants; A2: Under the design process, th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More