

Multi-agent interactive environment perception and path planning movement system
An environment-aware, multi-agent technology, applied in control/regulation systems, motor vehicles, transportation and packaging, etc., can solve the problems of poor autonomy of smart cars, inability to plan paths, and inability to move autonomously, so as to avoid repeated detection, The effect of saving working time and improving work efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
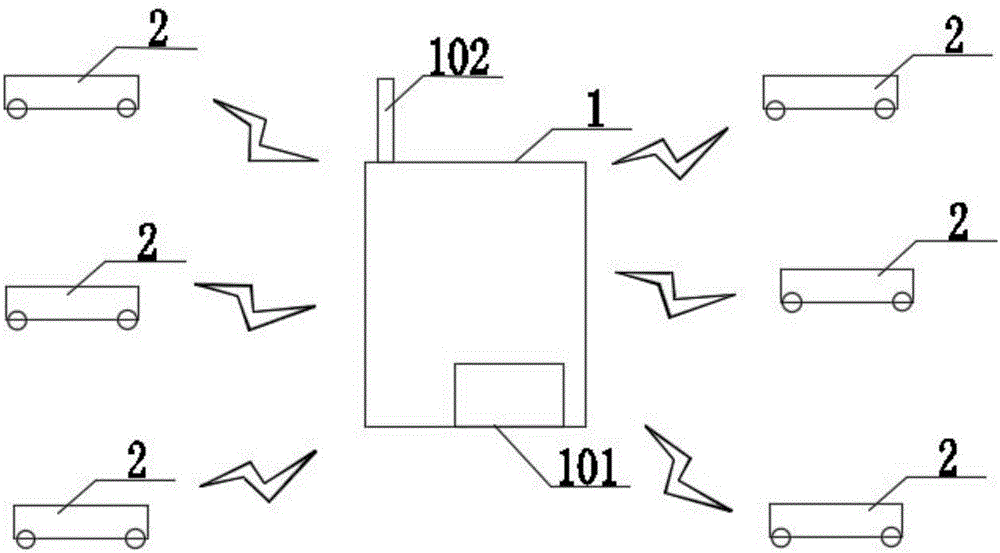
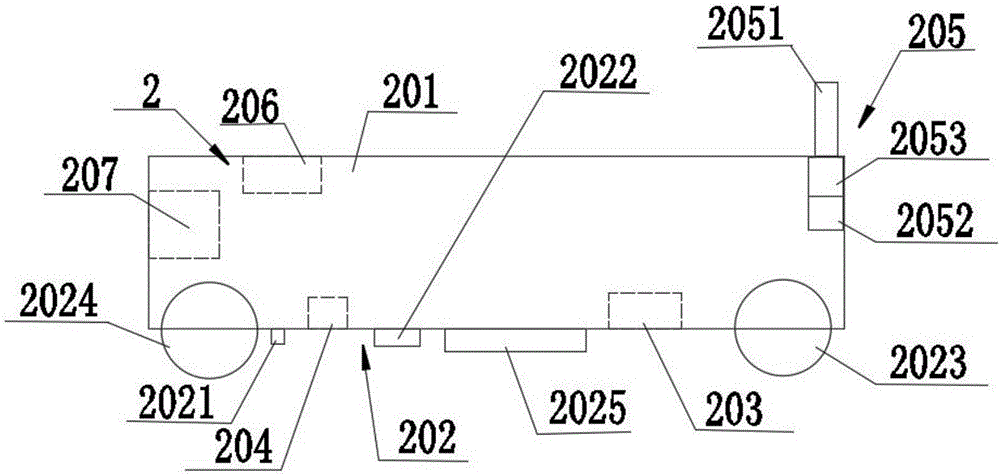
[0045] Such as figure 1 , 2 As shown, a multi-agent interactive environment perception and path planning motion system specifically includes: a data integration host 1, a plurality of smart cars 2; the data integration host 1 includes: a data processing unit 101, a first wireless transmission module 102, The first data storage module 103; the data processing unit 101 is connected with the first wireless transmission module 102 and the first data storage module 103 respectively; the smart car 2 includes: a car main body 201, a power system 202, a processing module 203, a positioning module 204, data Acquisition device 205, the second wireless transmission module 206, the second data storage module 207; Detect the ultrasonic sensor 2053 that detects the motion state of surrounding environment objects; Power system 202 includes: start switch 2021, power motor 2022, driving wheel 2023, steering wheel 2024, rechargeable battery 2025; Start switch 2021, power motor 2022, driving wh...
Embodiment 2
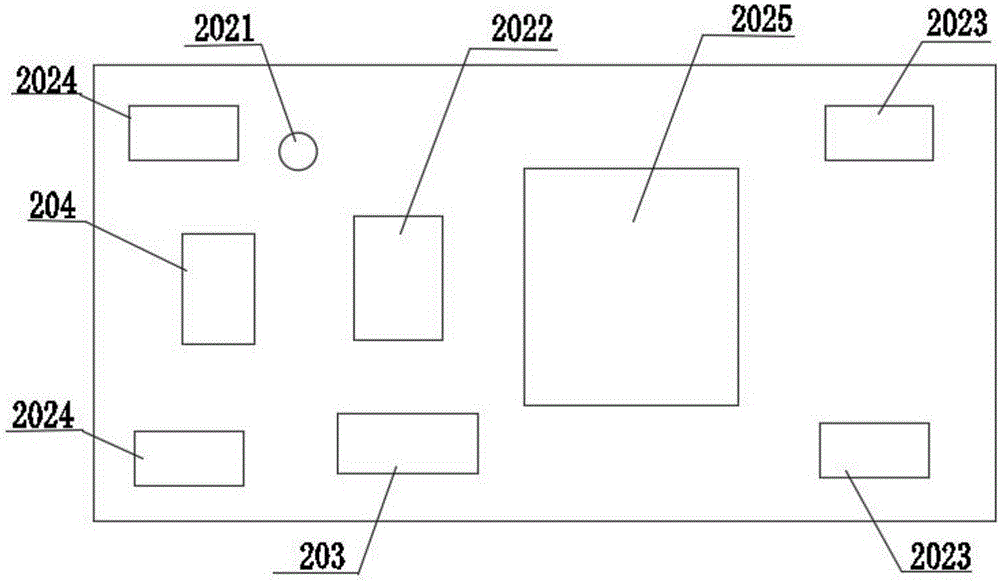
[0056] Such as image 3 , 4 As shown, this embodiment provides a multi-agent interactive environment perception and path planning motion system. The difference from Embodiment 1 is that the start switch 2021, the power motor 2022, the driving wheel 2023, the steering wheel 2024, the rechargeable battery 2025, The processing module 203 and the positioning module 204 are both arranged at the bottom of the trolley main body 201;
[0057]The start switch 2021, the power motor 2022, the driving wheel 2023, the steering wheel 2024, the rechargeable battery 2025, the processing module 203, and the positioning module 204 are protected by means of the bottom of the trolley main body 201,
[0058] When specifically installed on the bottom, a certain safety distance should also be kept from the edge of the bottom of the dolly main body 201, so that it will not easily collide with surrounding objects, and the start switch 2021, power motor 2022, driving wheel 2023, The steering wheel 20...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More