

Method for measuring hull deformation angle based on inertia instruments and iterative filtering algorithm
An iterative filtering algorithm, inertial instrument technology, applied in instruments, measuring devices, measuring angles, etc., can solve problems such as being unsuitable for long-term online measurement and increasing the amount of calculation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
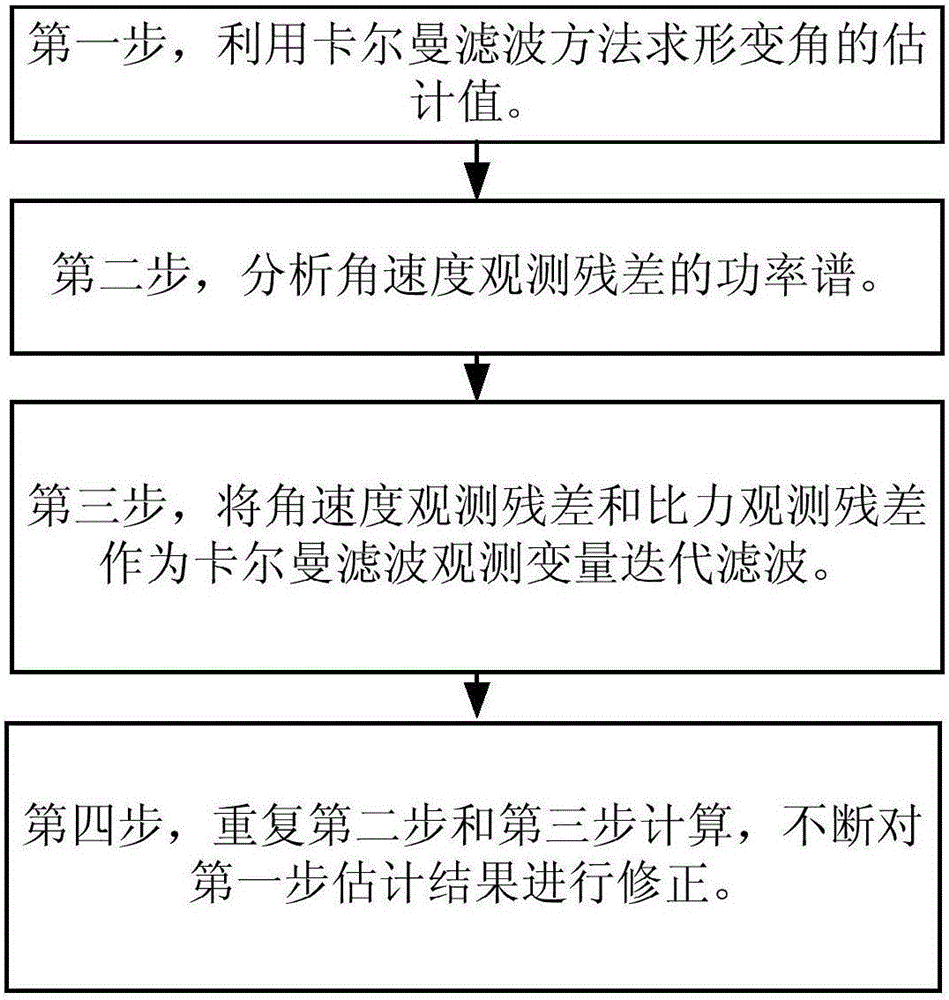
[0095] figure 1 It is a flowchart of the implementation steps of the present invention. As shown in the figure, the present invention comprises four steps:
[0096] The first step: use the Kalman filter method to obtain the estimated value of the deformation angle. In this step, the observation equation and state equation are given by equations (9) to (18). In the observed variable Z Obtained by the main inertial navigation and sub-inertial navigation, r in the observed variable Z s It can be measured by a laser range finder. After starting the Kalman filter, the estimated value of the deformation angle can be calculated in real time.
[0097] Step 2: Analyze the power spectrum of the angular velocity observation residuals. This step follows the first step. While obtaining the estimated value of the deformation angle, the angular velocity observation residual and the specific force observation residual defined by equations (20) to (21) are simultaneously calculated. Ev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More