

Double-motor parallelly-driven human body activity assisting device
A technology for human activity and power-assisting devices, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problems of increasing human burden and energy consumption, increasing system quality, etc., to increase accuracy and range of motion, and strengthen compact structure. sex, size reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
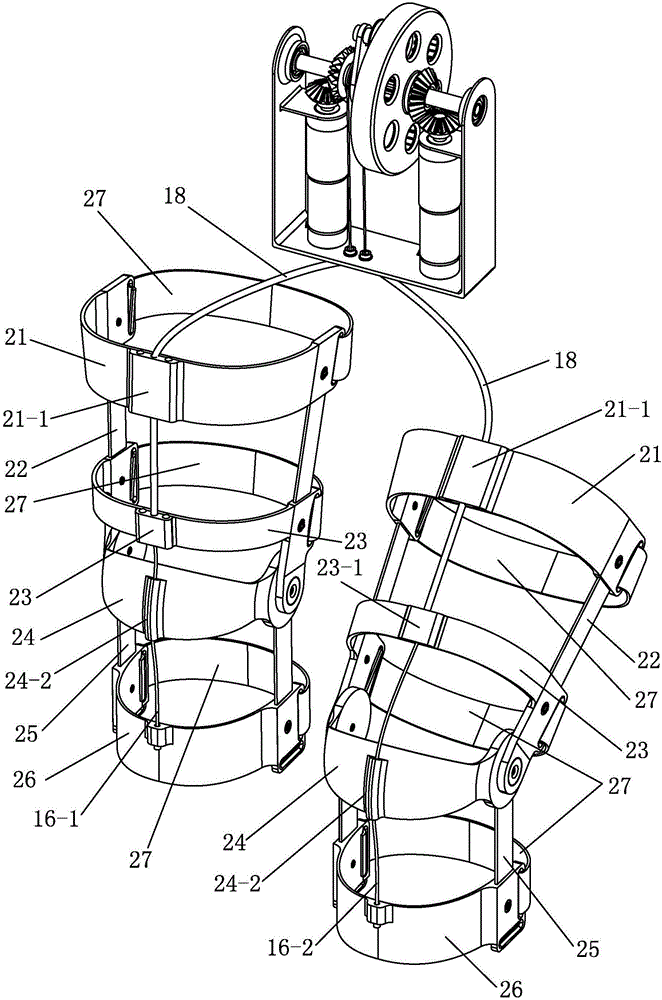
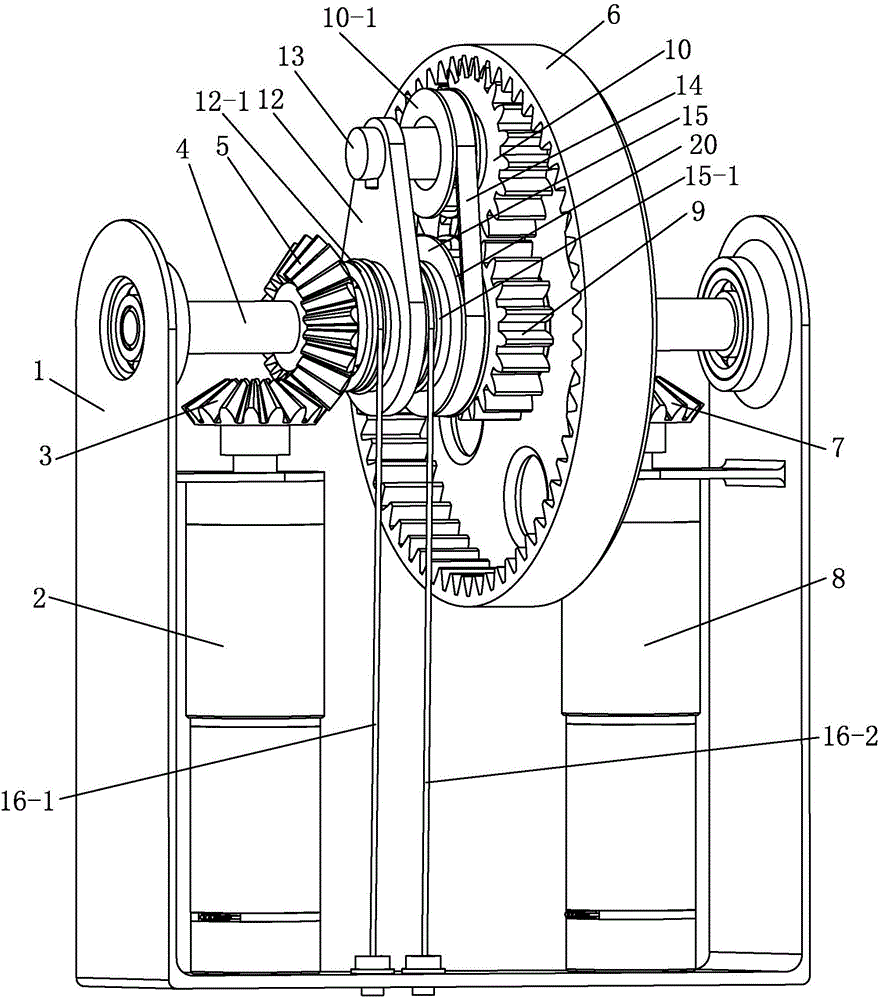
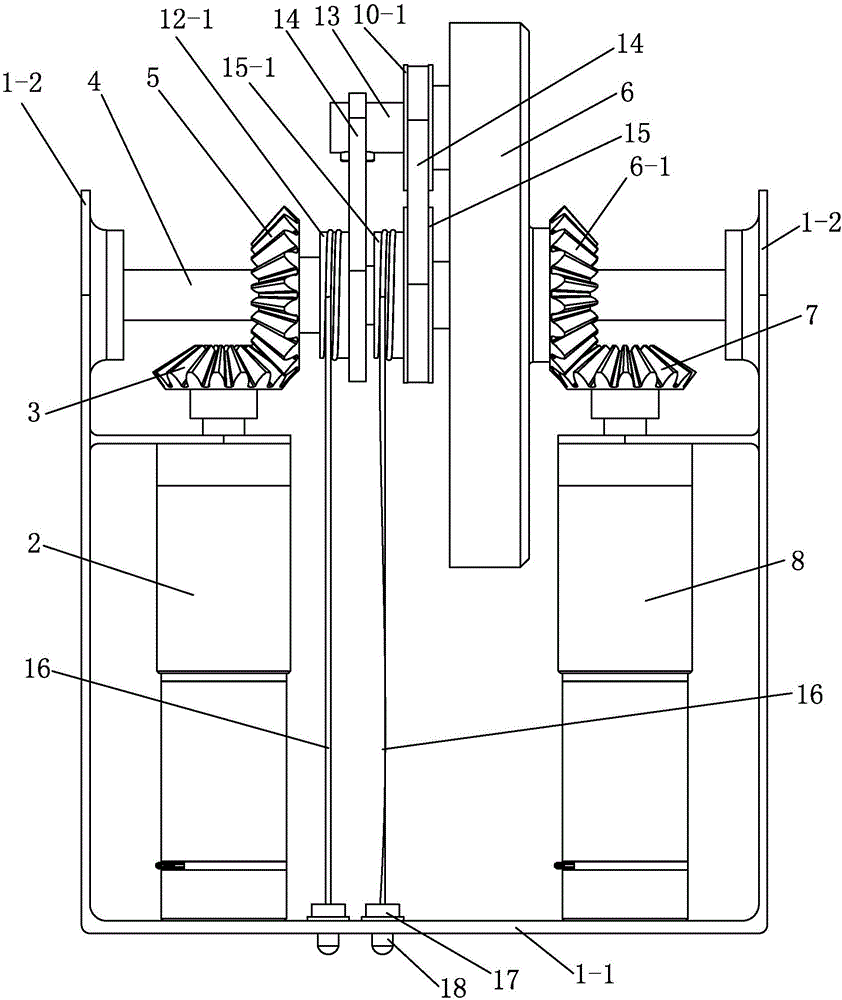
[0020] combine Figure 1-Figure 5 Description, a dual-motor parallel-driven human body activity assisting device, which includes a power unit, a transmission unit and an execution unit;
[0021] The power unit includes a support frame 1, a sun gear drive motor 2, a sun gear drive motor output bevel gear 3, a drive shaft 4, a sun gear drive motor drive bevel gear 5, an inner ring gear output bevel gear 6-1, an inner ring gear 6. The output bevel gear 7 of the inner ring gear drive motor, the inner ring gear drive motor 8 and the sun gear 9; the transmission unit includes the planetary gear 10, the planetary gear bracket 12, the planetary gear support shaft 13, and the No. 1 driving rope 16-1 And No. 2 drive rope 16-2; Described executive unit comprises power-assisted left leg, power-assisted right l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More