

Error-controllable industrial robot fairing movement track generation method
A technology of industrial robots and motion tracks, which is applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., and can solve problems such as poor continuity of robots, machine vibration, and unqualified quality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0083] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and examples of implementation. It should be understood that the specific implementation cases described here are only used to explain the present invention, and are not intended to limit the present invention.
[0084] The error-controllable industrial robot smooth motion trajectory generation method of the present invention is subdivided into the following four contents:
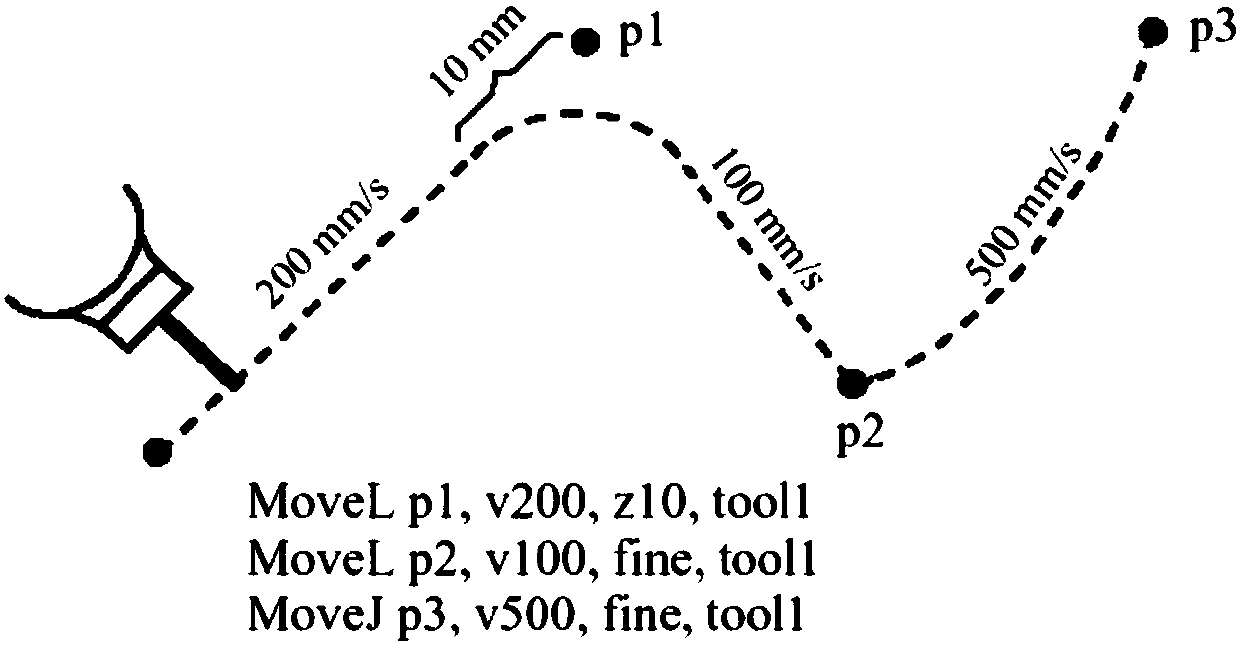
[0085] Generation of MOVEB motion instruction
[0086] Firstly, a new MOVEB motion instruction was invented, which is used to describe the motion trajectory of industrial robots obtained by off-line programming technology, and includes trajectory point error threshold and chord height error threshold information. Users can set trajectory point error and chord height error according to process re...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More