

Self-adjusting robot clamping jaw for grabbing hubs
A robotic and self-adjusting technology, used in chucks, manipulators, manufacturing tools, etc., to solve problems such as wheel hub clamping, wheel hub surface coating damage, and wheel hub support bending
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0016] The present invention will be described in further detail below in conjunction with the embodiments and accompanying drawings.
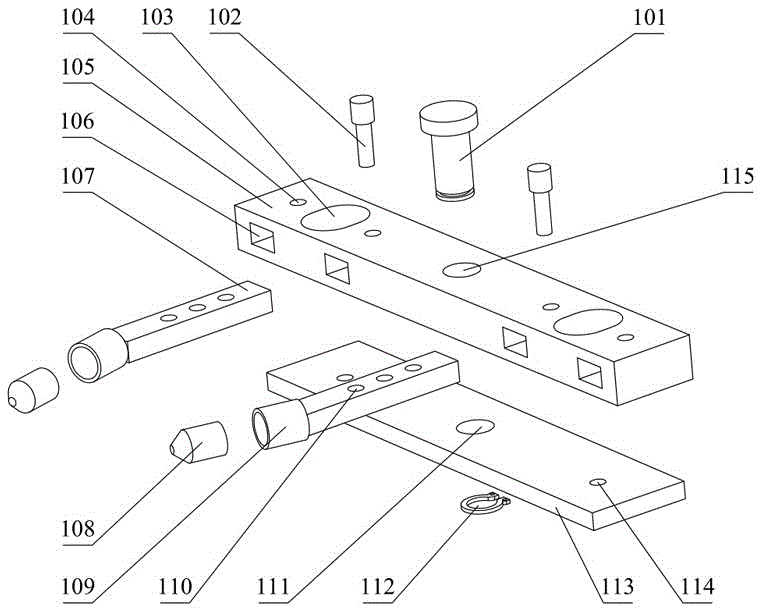
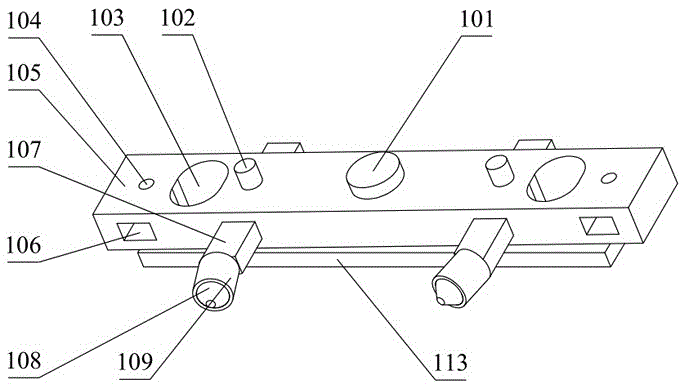
[0017] Such as figure 1 , figure 2 As shown, a self-adjusting robot gripper for grabbing a wheel hub includes a connecting plate and gripper fingers installed symmetrically on both sides of the connecting plate. The connecting plate includes an upper connecting plate 105 and a lower connecting plate 113. A resetting device is set between the plate 105 and the lower connecting plate 113, and a pin hole 115 and a pin hole 111 are correspondingly provided in the middle part of the upper connecting plate 105 and the lower connecting plate 113, and the rotating pin 101 is set to pass through the pin hole 115 and the pin hole 111, and A snap ring 112 is provided at the lower end of the rotating pin 101 to fit the upper connecting plate 105 and the lower connecting plate 113 together.
[0018] Strip-shaped through-holes 103 are arranged symmetrica...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More