Detection method of linear grating ruler
A technology of linear grating and detection method, which is applied to measurement devices, optical devices, instruments, etc., can solve the problems of relying on manual point-finding measurement results and large influence, and achieve the effect of automatic detection, elimination of influence, and convenient detection.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
[0043] The detection method of the linear grating ruler is realized based on the detection device of the one-dimensional linear grating ruler;
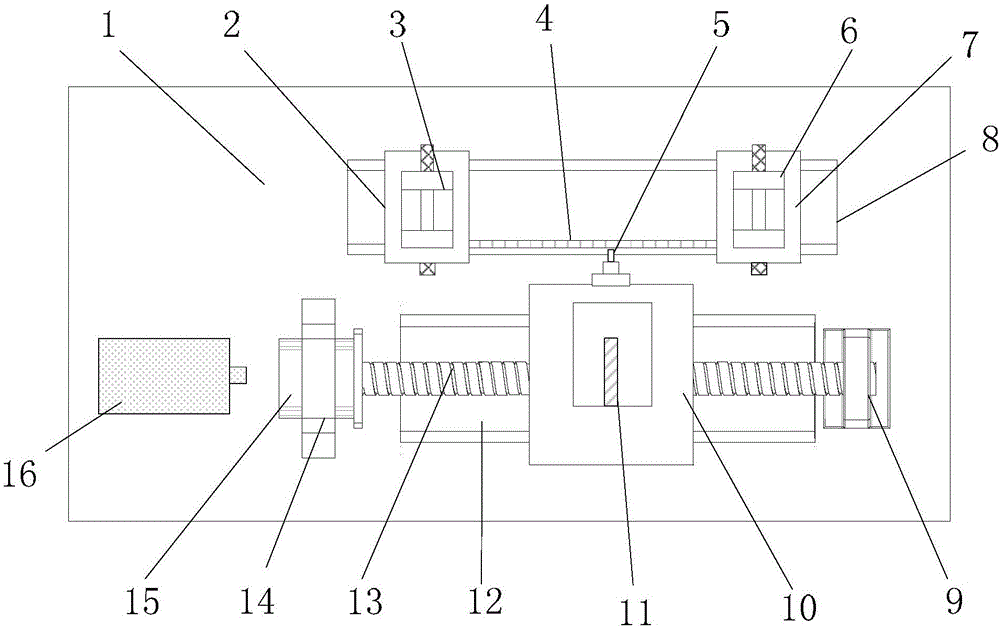
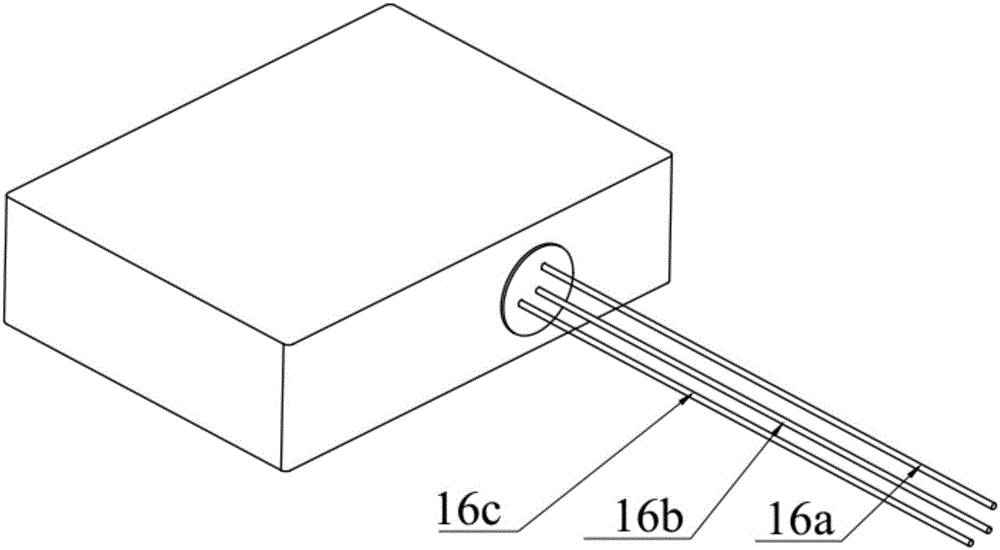
[0044] like figure 1 As shown, the detection device of the one-dimensional linear grating ruler includes a base 1, a displacement reference mechanism, a displacement transmission mechanism and a three-optical axis laser interferometer 16;
[0045] The displacement reference mechanism includes a first clamping slider 2, a first clamping mechanism 3, a second clamping slider 7, a second clamping mechanism 6 and a slider guide seat 8;
[0046] The displacement transmission mechanism includes a motor 15, a ball screw 13, a ball guide seat 12, a ball slider 10, a grating reading head 5, and a bearing seat 9;
[0047] The slider guide seat 8 and the ball guide seat 12 are arranged on the base 1; axis parallel;
[0048] The first clamping slider 2 and the second clamping slider 7 are both arranged on the slider guide seat 8 and can move a...
specific Embodiment approach 2
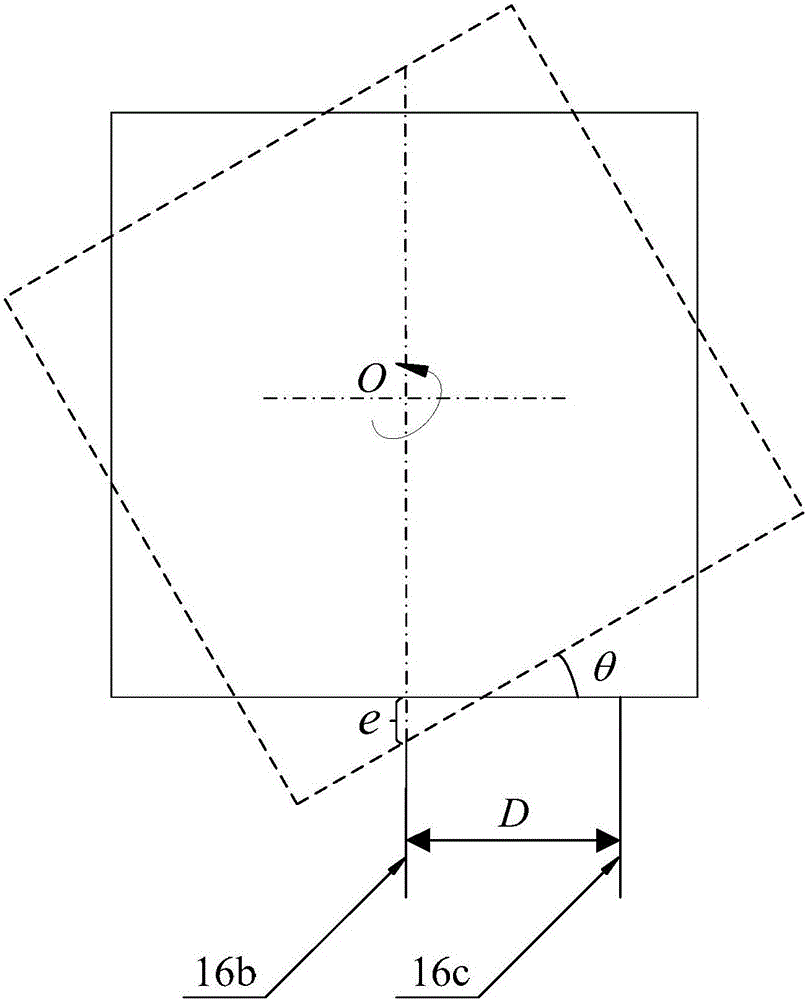
[0071] Specific implementation mode 2: Combining figure 2 and image 3 Describe this embodiment,
[0072] In step 5 of this embodiment, for the i-th measurement point, the displacement values sαi' and sγi' measured by the three-axis laser interferometer are used to compensate sβi' to obtain s i ' The process includes the following steps:
[0073] For the i-th measurement point, the deflection angle is obtained from the distance D between the second beam 16b and the third beam 16c
[0074] Then, according to the distance D and the deflection angle θ, the displacement deviation e on the second beam 16b caused by the deflection is calculated, and then through the formula s i '=sβi'-e compensate sβi' to get s i '.
[0075] Other steps and parameters are the same as in the first embodiment.
specific Embodiment approach 3
[0077] In the fifth step of this embodiment, e=Dsinθ.
[0078] Other steps and parameters are the same as in the second embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



