

Counter-position placement abrasive belt grinding robot
A technology of abrasive belt grinding and robots, which is applied in the direction of abrasive belt grinders, grinding workpiece supports, grinding/polishing equipment, etc., can solve the problems of low production efficiency and high labor intensity, so as to improve production efficiency and reduce labor intensity , to achieve the effect of automatic grinding
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The existing technology of grinding hardware products is: through the rotation of the abrasive belt machine, the workpiece is manually sent to the front end of the abrasive belt for grinding. The labor intensity of the employees of the enterprise is high and the production efficiency is low.
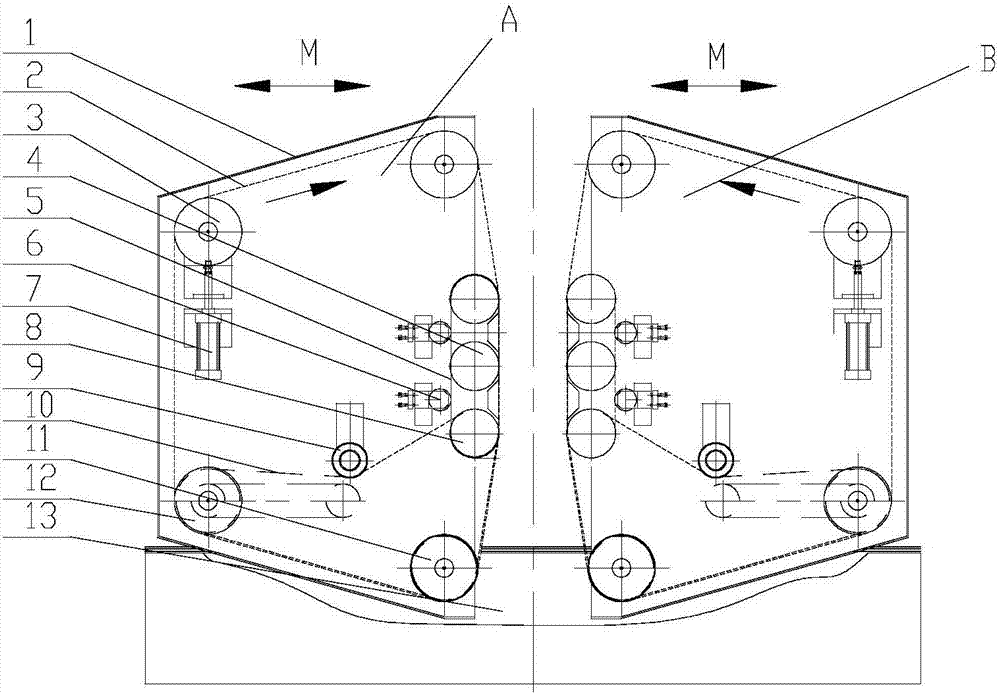
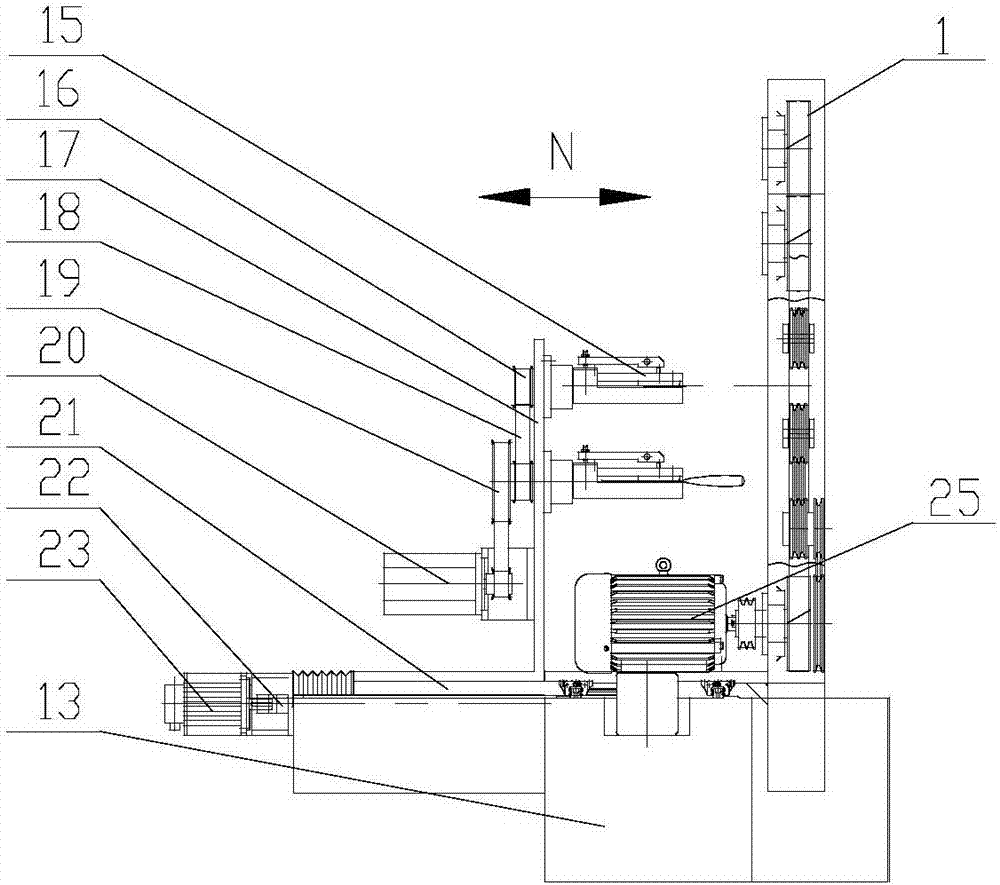
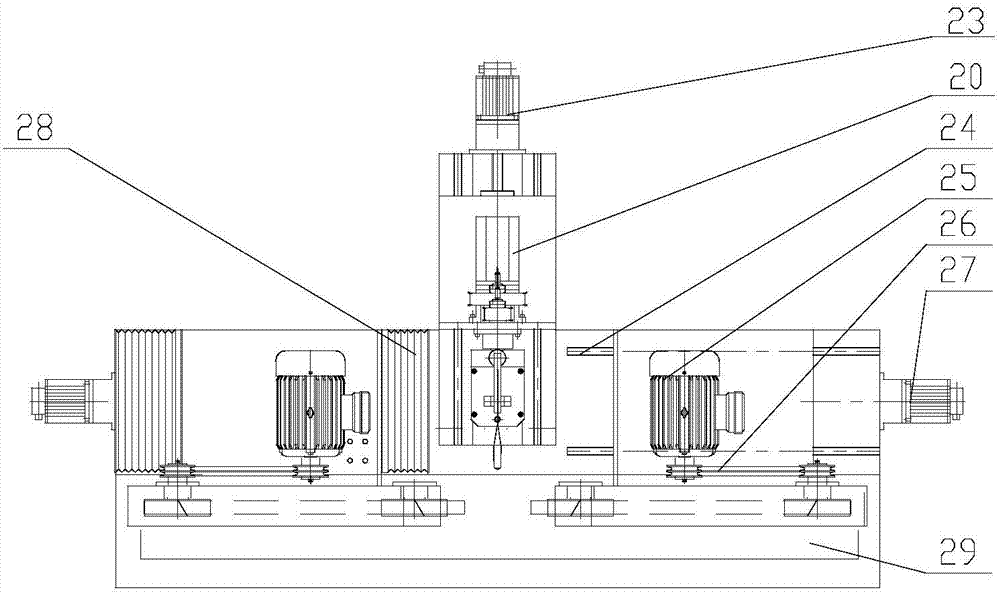
[0034] The design concept of the present invention is: aiming at the problems of high labor intensity and low production efficiency caused by manually sending the workpiece to the front end of the abrasive belt for grinding, the present invention realizes grinding through the left grinding unit and the right grinding unit. The main cutting movement, the left grinding unit and the right grinding unit can realize the lateral feed movement under the drive of the servo motor; the manipulator fixture realizes the longitudinal movement through the servo motor drive, this movement is the feeding movement of the workpiece, and the manipulator fixture can realize the rotation at the same tim...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More