

Under-actuated five-fingered dexterous hand control system
A control system and dexterous hand technology, which is applied in the field of underactuated five-finger dexterous hand control system, can solve the problems such as the difficulty of trajectory tracking, and achieve the effects of good control effect, convenient programming, and simple control circuit
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0014] The present invention will be further described below in conjunction with drawings and embodiments.
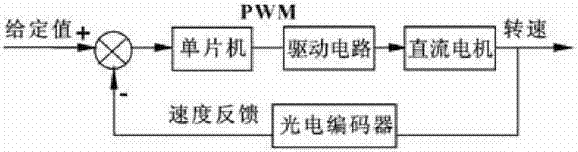
[0015] Such as figure 1 , the control system uses AT89 C51 single-chip microcomputer to realize the PWM speed control of the micro DC motor. The motor can run according to the set value, and can realize the forward and reverse control. At the same time, the speed of the motor can be fed back to the single-chip microcomputer through the encoder to realize the closed-loop control of the speed .
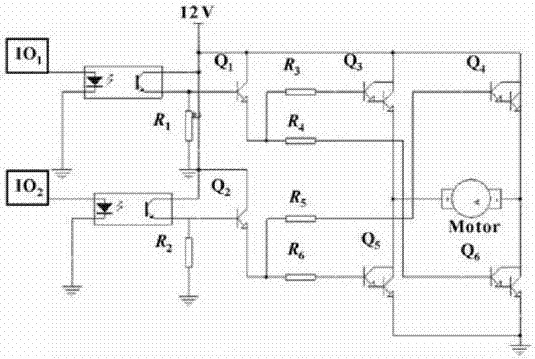
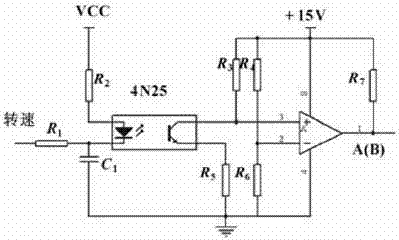
[0016] The hardware circuit of the control system mainly includes several parts such as PWM signal generation circuit, motor drive circuit, speed feedback detection circuit, keyboard and display. Among them, the PWM signal generation circuit mainly adds a high-speed photoelectric isolation device between the single-chip microcomputer circuit and the motor drive amplifier circuit to generate a PWM signal and invert the PWM signal, that is, the high-level duration of the PWM signa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More