

Non-linear robust control method of automobile anti-lock braking system based on active suspension assistance
A technology of anti-lock braking and active suspension, applied in the direction of suspension, brake, elastic suspension, etc., can solve the problems of wheel speed fluctuation, shorten the braking distance, etc., and achieve the effect of preventing the braking process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
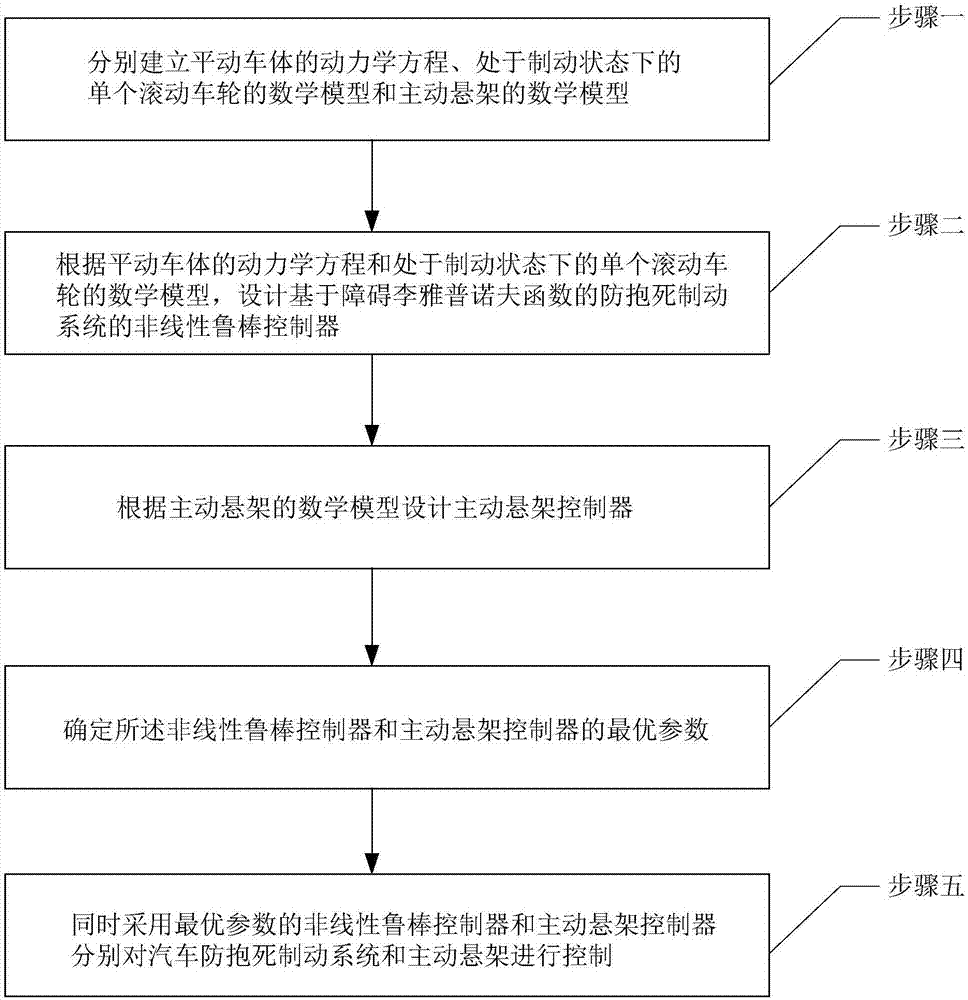
[0072] Embodiment one: the following combination figure 1 This embodiment will be described in detail.
[0073] The nonlinear robust control method of the automobile anti-lock braking system based on active suspension assistance described in this embodiment includes:
[0074] Step 1. Establishing the dynamic equation of the translational car body, the mathematical model of a single rolling wheel under braking and the mathematical model of the active suspension;
[0075] Step 2, according to the dynamic equation of the translational car body and the mathematical model of a single rolling wheel under braking, design a nonlinear robust controller of the anti-lock braking system based on the obstacle Lyapunov function;
[0076] Step 3, designing the active suspension controller according to the mathematical model of the active suspension;
[0077] Step 4, determine the optimal parameters of the nonlinear robust controller and the active suspension controller, under the joint con...
Embodiment 2
[0079] Embodiment 2: This embodiment is to further limit the nonlinear robust control method of the automobile anti-lock braking system based on active suspension assistance described in Embodiment 1.
[0080] In the non-linear robust control method of an automobile anti-lock braking system based on active suspension assistance described in this embodiment, the first step includes:
[0081] Step A, under the situation of ignoring the slope resistance and air resistance when the vehicle is in translation, according to Newton's second law, establish the dynamic equation of 1 / 4 vehicle in translation:
[0082]
[0083] Among them, F μ is the adhesion force used for the wheel-road surface, m is the mass of 1 / 4 of the car body, and v is the acceleration of the car body;
[0084] Step B, establish the mathematical model of the single rolling wheel under the braking state:
[0085]
[0086] Among them, R is the effective rolling radius of the wheel, T b is the braking torque...
Embodiment 3
[0090] Embodiment 3: This embodiment further limits the nonlinear robust control method of the automobile anti-lock braking system based on active suspension assistance described in Embodiment 2.
[0091] In the non-linear robust control method of an automobile anti-lock braking system based on active suspension assistance described in this embodiment, the second step includes:
[0092] Step D, build tire model:
[0093]
[0094]
[0095]
[0096] Among them, μ is the road adhesion coefficient, λ is the wheel slip rate, v is the vehicle speed, F Z is the vertical load on the tire, c 1 、c 2 and c 3 Both are tire model coefficients, and their values are related to the road surface type:
[0097] When the road surface type is wet asphalt, c 1 、c 2 and c 3 They are 0.587, 33.822 and 0.347 respectively;
[0098] When the pavement type is dry concrete, c 1 、c 2 and c 3 1.1973, 25.168 and 0.5373 respectively;
[0099] When the pavement type is dry cobblestone, ...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Damping coefficient | aaaaa | aaaaa |
| Quality | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More