

Four-claw type humanoid pipe climbing robot
A technology for robots and pipe-climbing, applied in the field of pipe-climbing robots, can solve the problems of unstable operation, poor carrying capacity, and inability to cross pipes, etc., and achieve the effects of good work stability, strong load capacity, and high moving efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments, which is not intended to limit its protection scope.
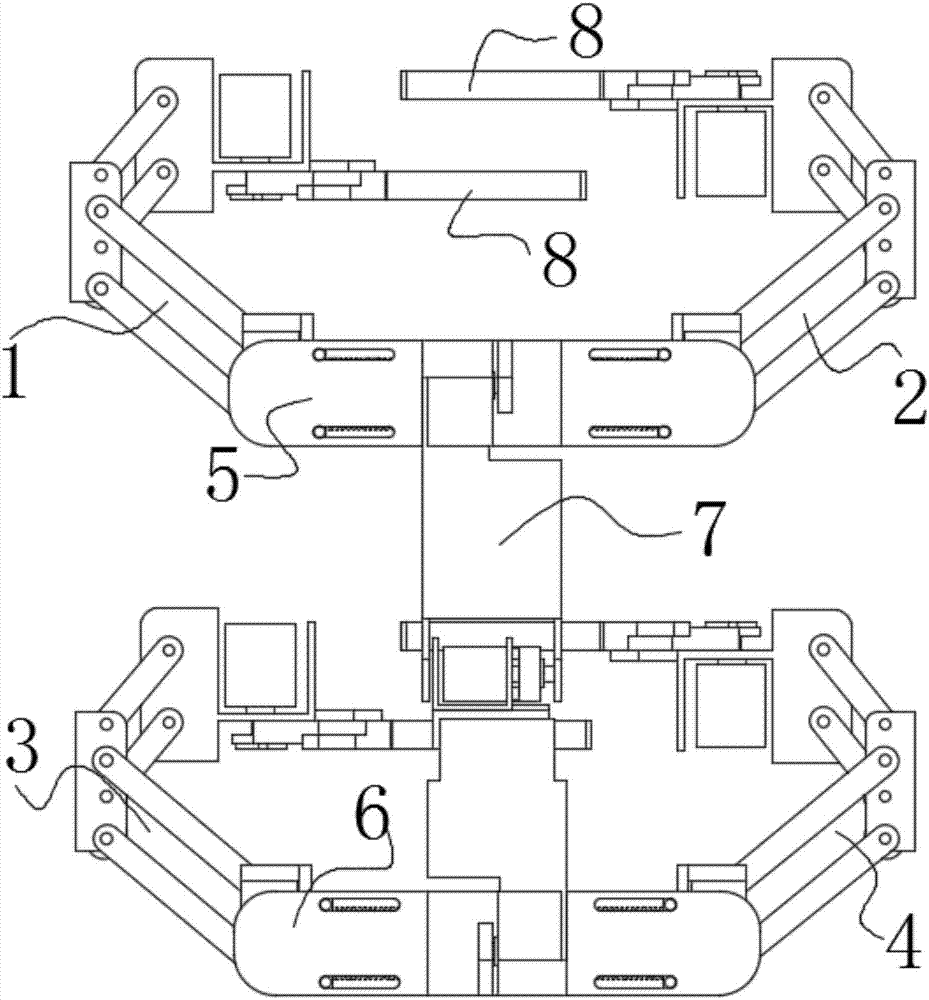
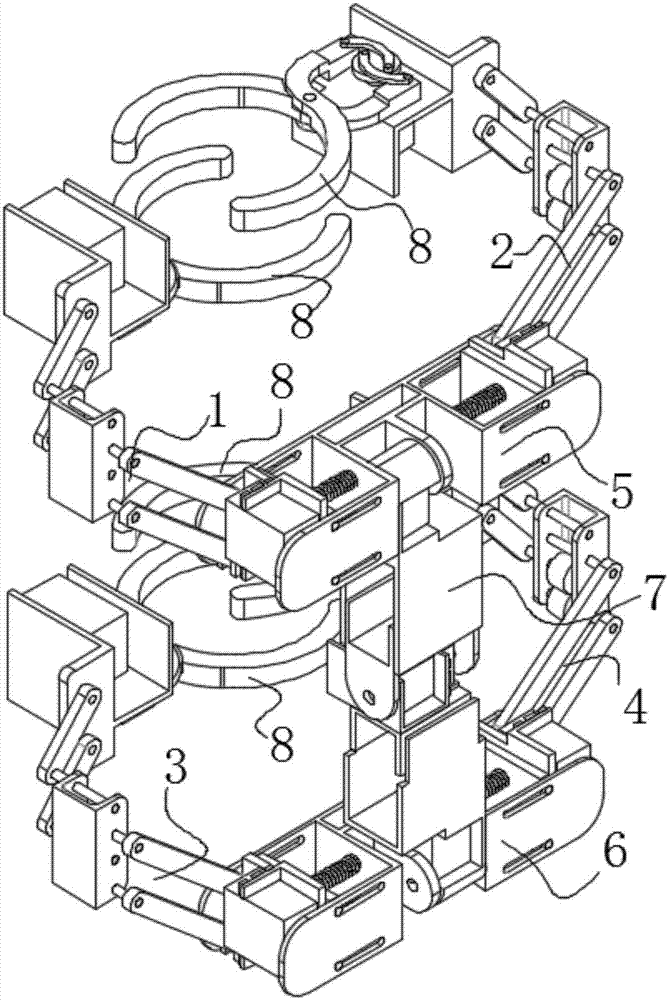
[0033] likefigure 1 and figure 2 As shown, a four-claw humanoid pipe-climbing robot includes symmetrically arranged limbs and an upper torso 5 and a lower torso 6 that connect the limbs as one; Robotic arm, the limbs are left upper limb 1, right upper limb 2, left lower limb 3 and right lower limb 4, wherein left upper limb 1 and right upper limb 2 are respectively connected to the left and right ends of the upper torso 5, left lower limb 3 and right lower limb 4 are respectively connected to The left and right ends of the lower torso 6 are connected;
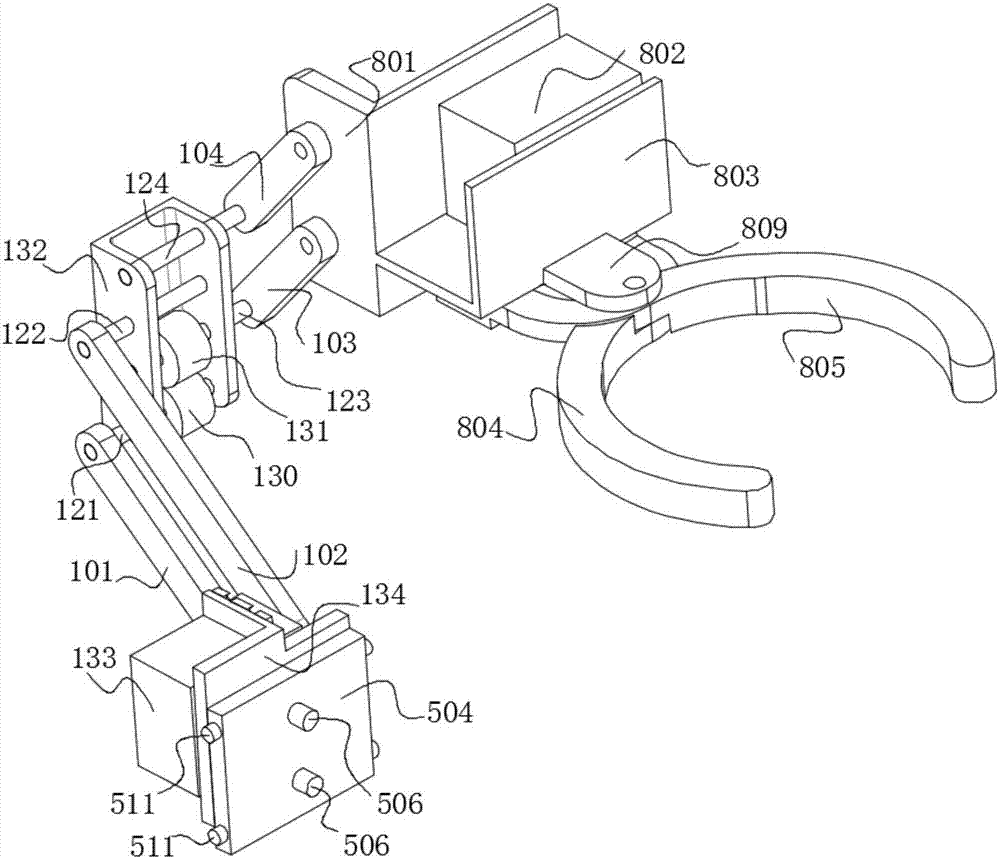
[0034] like Figure 5 and Figure 6 As shown, the upper torso 5 includes a trunk bottom plate 501, two extruded sliding blocks 504 and four support plates 502 respectively arranged at two ends of the trunk bottom plate 501, and the two sup...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More