

Unified design method for lightweight mechanical arm
A design method and technology of a robotic arm, applied in the field of robotics, can solve the problems of cumbersome structure, small load-to-weight ratio, high power consumption, etc., and achieve the effect of good optimization effect and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] Below in conjunction with accompanying drawing and specific embodiment the present invention will be described in further detail:
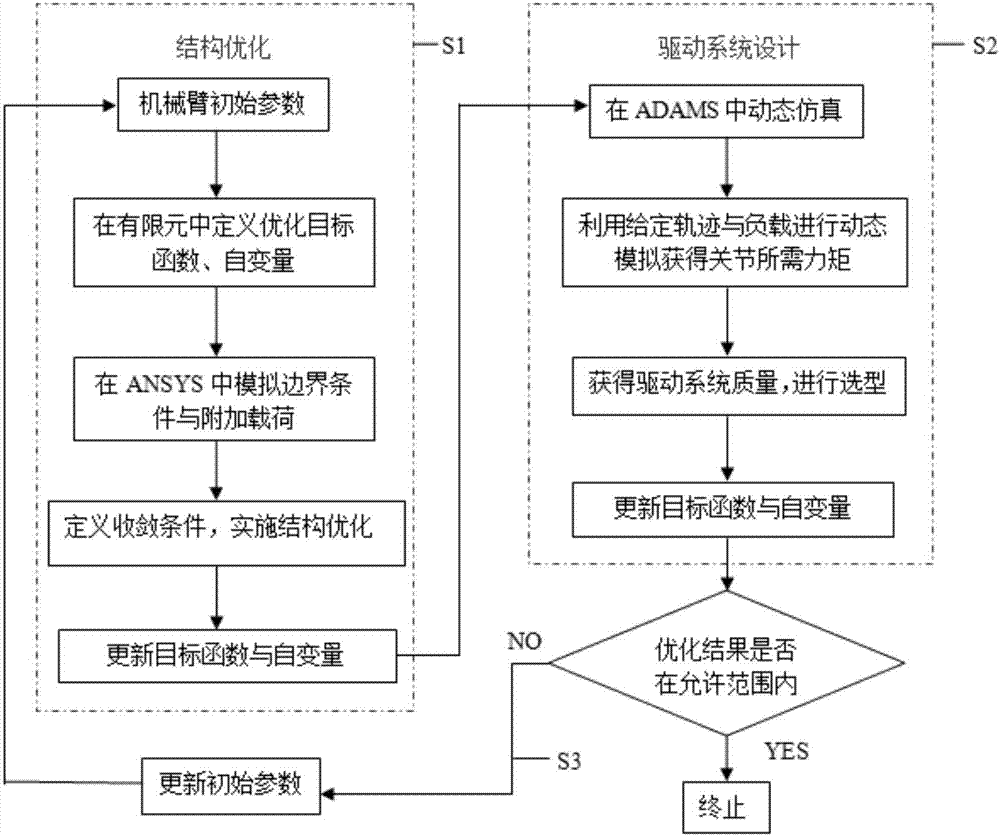
[0029] A unified design method of a lightweight mechanical arm designed by the present invention comprises the following steps:
[0030] S1. Structural optimization: Preliminary positioning of the size of the manipulator, building a 3D model, importing the 3D model into the finite element, defining the initial values of the optimization objective function, design variables, and constraints, and completing the structure based on the quadratic Lagrangian algorithm The first optimization of , the design variables and objective function are updated according to the optimization results;
[0031] S2. Drive system design: use the updated independent variable and objective function after the structural optimization as the initial data of the manipulator drive system, perform dynamic simulation and analysis on the drive system in ADAMS, complete ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More