

Brain-controlled virtual human obstacle avoidance control method
A control method and technology of virtual human, applied in the direction of instrument, character and pattern recognition, input/output of user/computer interaction, etc., can solve the problems of reducing security risk and cost, monotonous virtual environment, poor interactivity, etc., to improve efficiency , Improve training effect, good experience effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the embodiments and the accompanying drawings, but the embodiments of the present invention are not limited thereto.
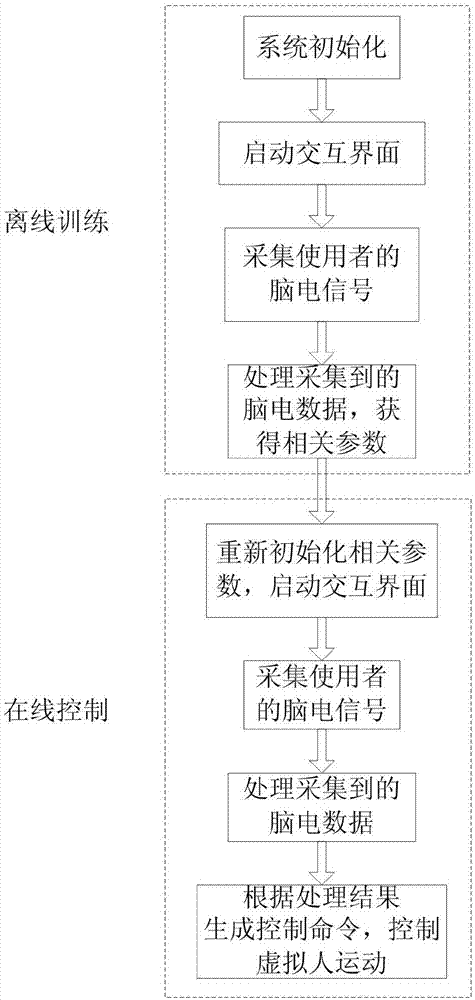
[0046] Such as figure 1 , a brain-controlled virtual human obstacle avoidance control method, comprising an offline training step and an online control step;
[0047] Specifically, offline training includes the following steps:
[0048] S1. System initialization: system initialization includes initialization of system hardware devices and initialization of related parameters.
[0049] The system hardware equipment includes an EEG signal acquisition instrument, an EEG electrode cap with 32 channels connected to the EEG signal acquisition instrument, and the electrodes on the electrode cap are in standard electrode positions. Before collecting brain signals, it is necessary to inject conductive glue between the electrodes of the electrode cap and the user's brain to ensu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More