

A fixed-point positioning method and system for an unmanned aerial vehicle
A positioning method and unmanned aerial vehicle technology, applied in the direction of three-dimensional position/channel control, etc., can solve the problems of insufficient positioning accuracy, insufficient accuracy, and complex algorithms, and achieve the effects of fast positioning, simple implementation, and simple algorithms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in conjunction with the accompanying drawings and specific embodiments.
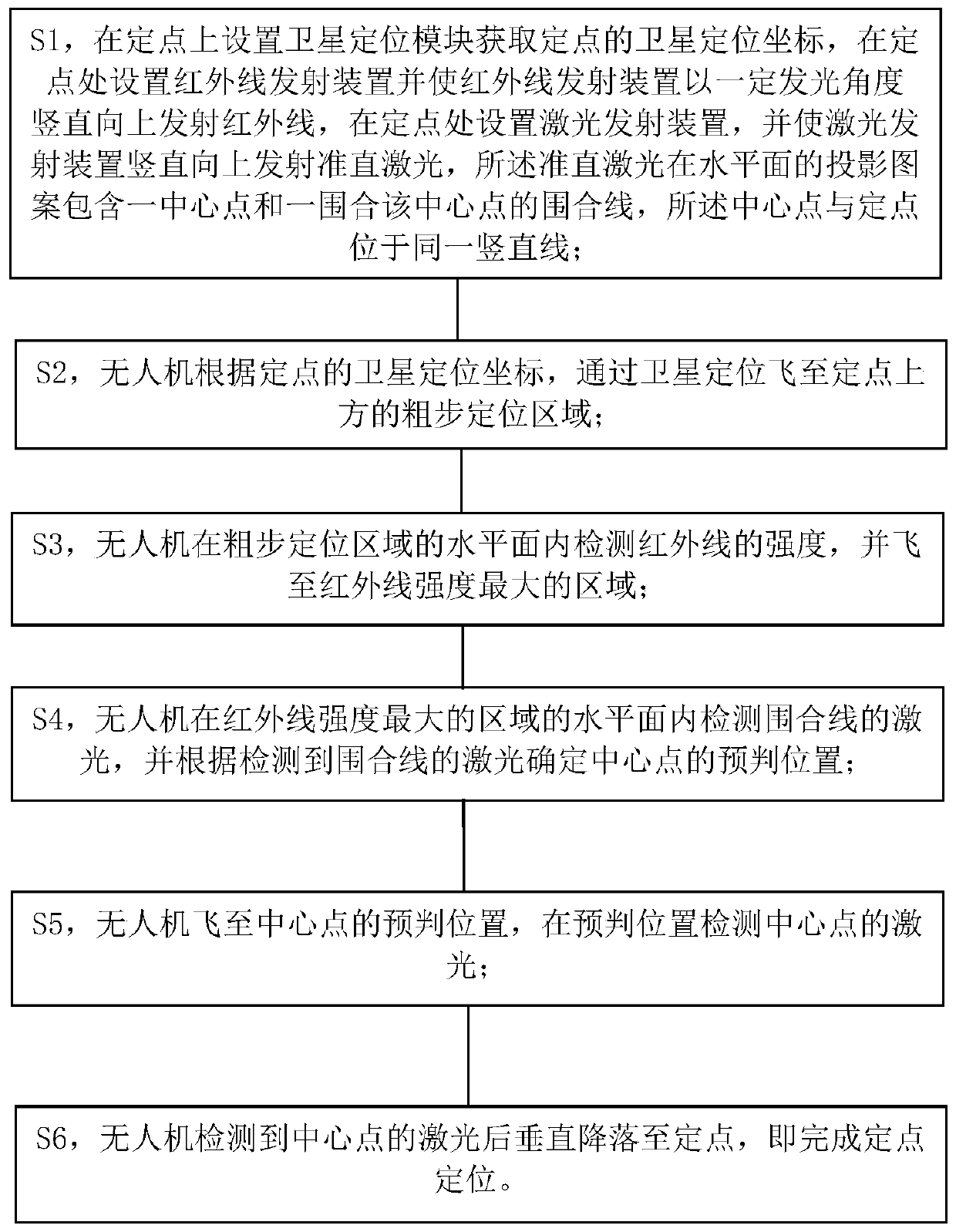
[0028] Such as Figure 1-3 Described, a kind of unmanned aerial vehicle fixed-point positioning method, comprises the steps:
[0029] S1, set the satellite positioning module on the fixed point B of the apron 1 to obtain the satellite positioning coordinates of the fixed point B. In this specific embodiment, the satellite positioning module is a GPS positioning module. Of course, in other embodiments, it can also be Beidou satellite positioning module, in some embodiments, if the apron is fixed, the GPS positioning module may not be provided, as long as the GPS positioning coordinates are determined when the apron is set.
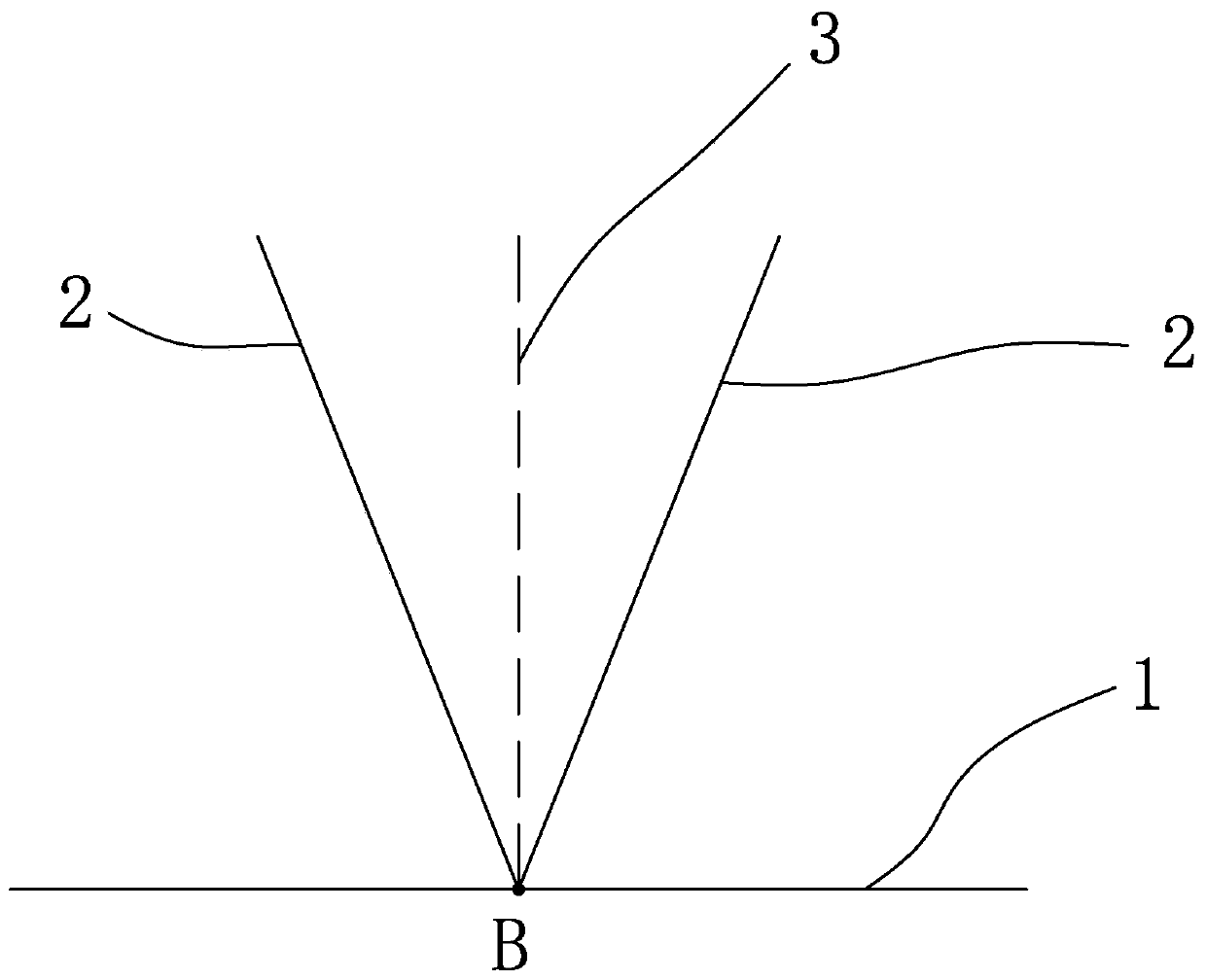
[0030] Set the infrared emitting device at the fixed point B and make the infrared emitting device emit infrared rays vertically upward at a certain light angle, specifically as figure 2 As shown, the normal axis 3 of the infra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More