

Instrument positioning method applicable to substation patrol inspection robot
An inspection robot and positioning method technology, applied in the field of image recognition, can solve problems such as inability to locate instruments, reducing system scalability, and failure of affine transformation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
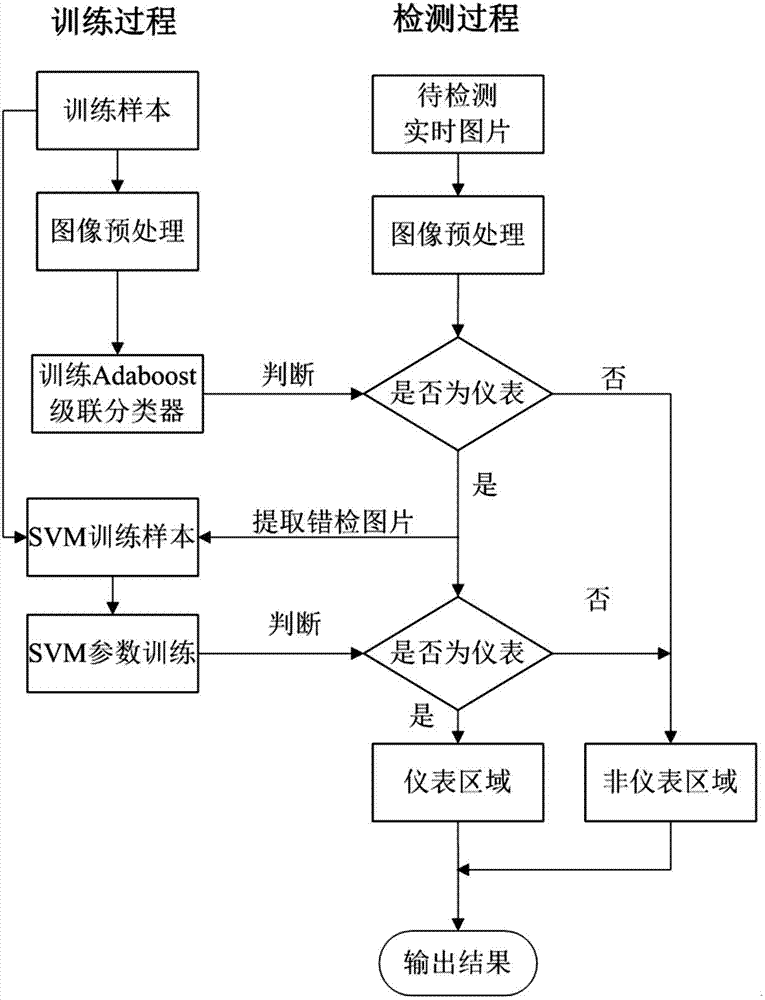
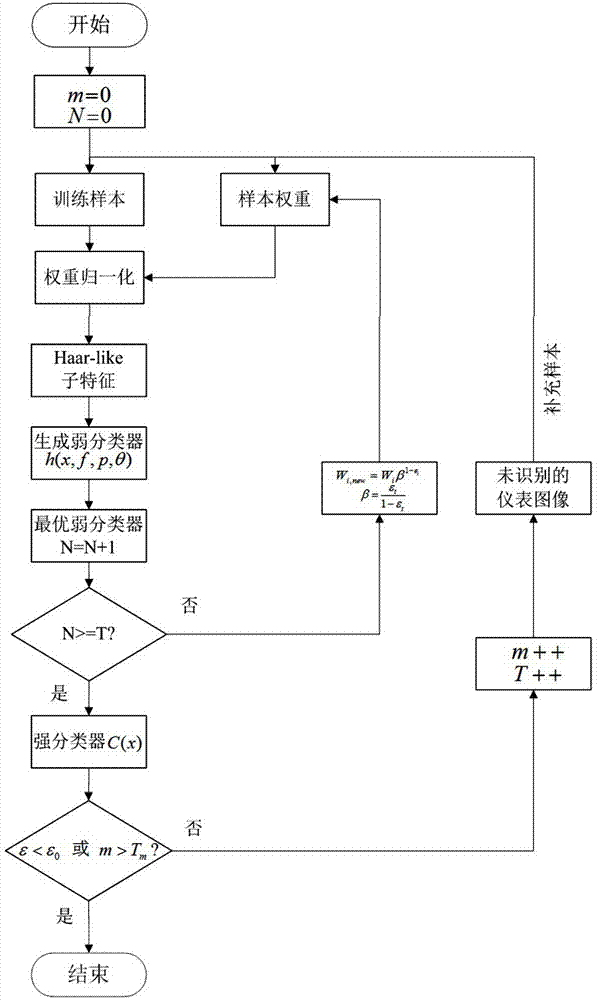
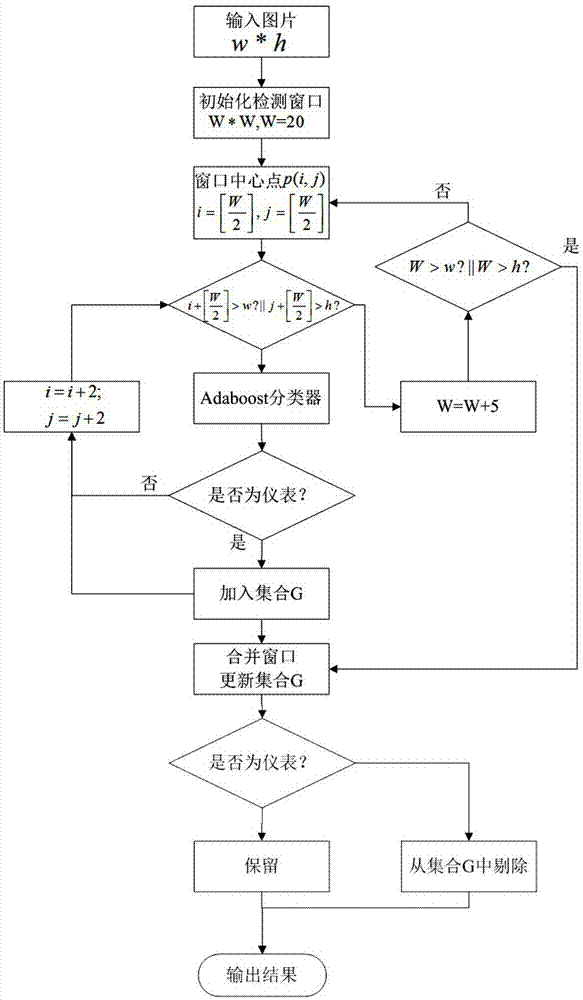
[0054] See attached picture. In this embodiment, an Adaboost classifier and an SVM classifier are used to form a two-stage instrument location system for instrument location. First, in order to train the Adaboost classifier, a large number of samples need to be collected, including positive sample images containing only the dashboard and negative sample images containing only the background. Then, in order to reduce the probability of instrument missed detection, a higher detection rate is set, and these samples are used to train an Adaboost classifier with a high detection rate; the training process includes feature selection, weak classifier training, strong classifier training. The image to be processed uses this classifier with a high detection rate to detect the instrument once, and can locate one or more instrument areas; use the SVM-based binary classifier as the classifier for the secondary detection, and perform secondary detection on the candidate area Detect and f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More