

Exoskeleton finger function rehabilitation device based on multi-section continuous structure
A rehabilitation device and exoskeleton technology, applied in passive exercise equipment, physical therapy, etc., can solve the problems of inability to adapt to individual patient finger length differences, poor wearability, and unfree fingertips, and achieve safe operation, easy implementation, and easy wear Comfortable, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
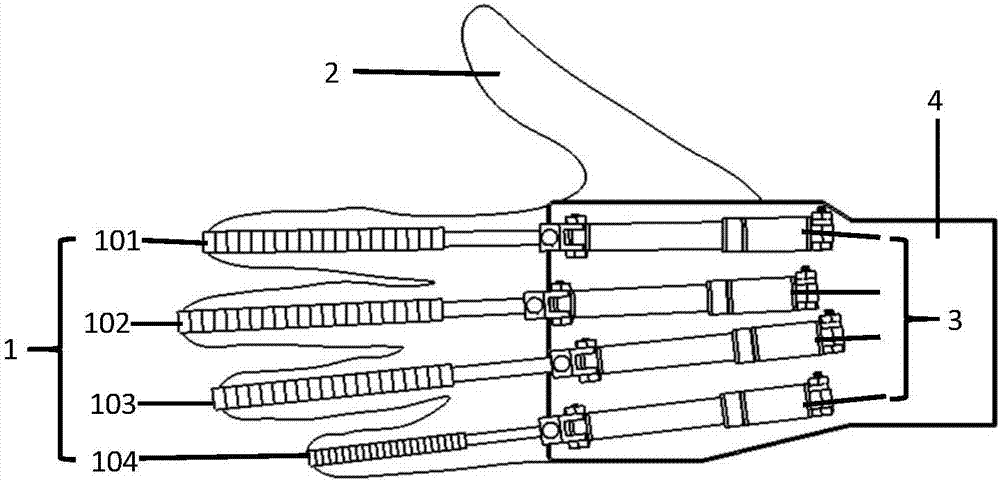
[0025] refer to figure 1 , an exoskeleton finger function rehabilitation device based on a multi-segment continuous structure, including a finger driving mechanism 1, the finger driving mechanism 1 is pasted on the glove module 2 by Velcro, the finger driving mechanism 1 is connected with a linear actuator motor 3, and the linear actuator The motor 3 is fixed on the loading platform 4, the loading platform 4 is connected to the glove module 2, and the loading platform 4 is located at the forearm of the affected hand;
[0026] The finger drive mechanism 1 includes an exoskeleton index finger drive mechanism 101, an exoskeleton middle finger drive mechanism 102, an exoskeleton ring finger drive mechanism 103, Exoskeleton little finger driving mechanism 104 .
[0027] The exoskeleton index finger drive mechanism 101, exoskeleton middle finger drive mec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More