

Ground unmanned platform tactical mission planning system based on Clanguage integration generation system
A mission planning, unmanned platform technology, applied in the direction of reasoning methods, etc., can solve the problems of less research work on mission planning systems, inability to meet the diverse mission needs of ground unmanned platforms, and limited number of mission planning platforms and mission types. Achieve the effect of system function expansion, improvement of timeliness and accuracy, and strong practicability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
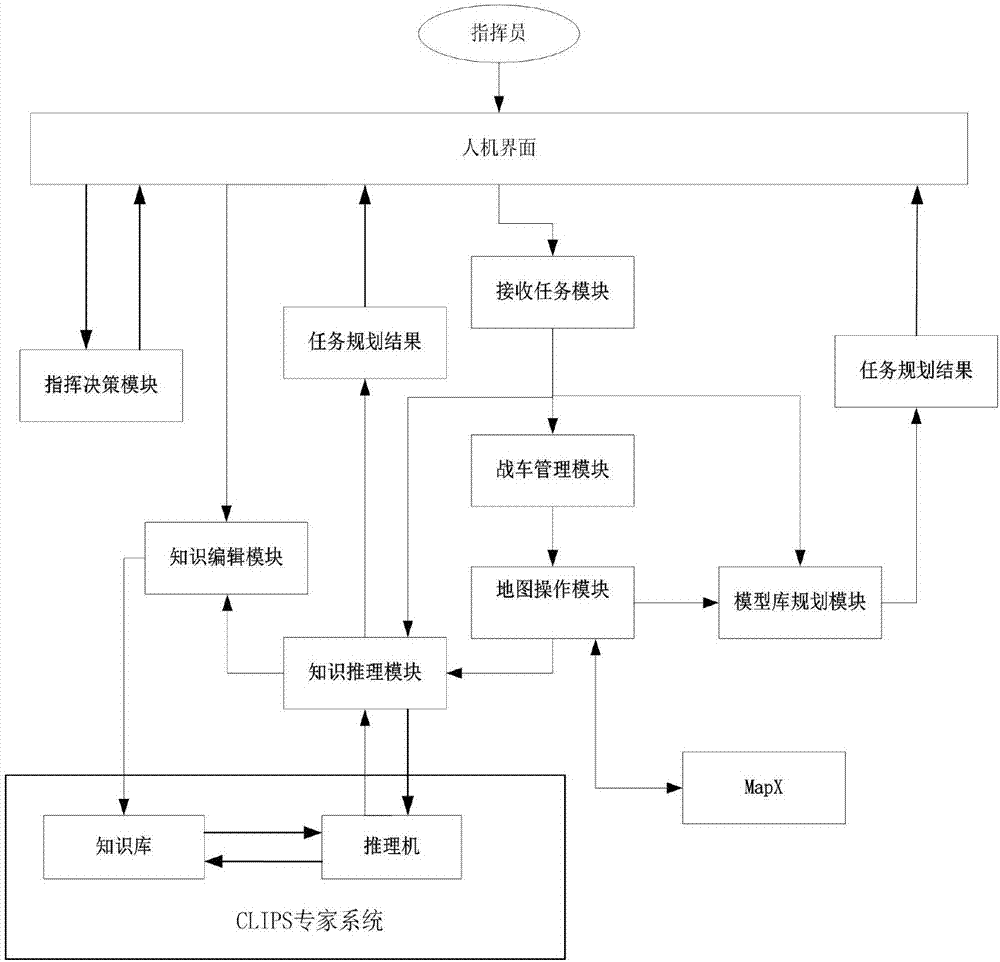
[0033] The embodiment of the present invention is based on the structure frame of the ground unmanned platform task planning system based on the CLIPS expert system. figure 1 As shown, the present invention provides a kind of ground unmanned platform tactical mission planning system based on CLIPS (CLanguage Integrated Production System, common expert system tool) expert system, and described system comprises man-machine interface module, receiving task module, tank management module , map operation module, knowledge reasoning module, knowledge editing module, command decision module, model base planning module and CLIPS expert system, the man-machine interface module, receiving task module, tank management module, map operation module and knowledge reasoning module in sequence Carry out data transmission; The model library planning module carries out data transmission with the knowledge reasoning module and the map operation module respectively; The knowledge editing module ca...
Embodiment 2
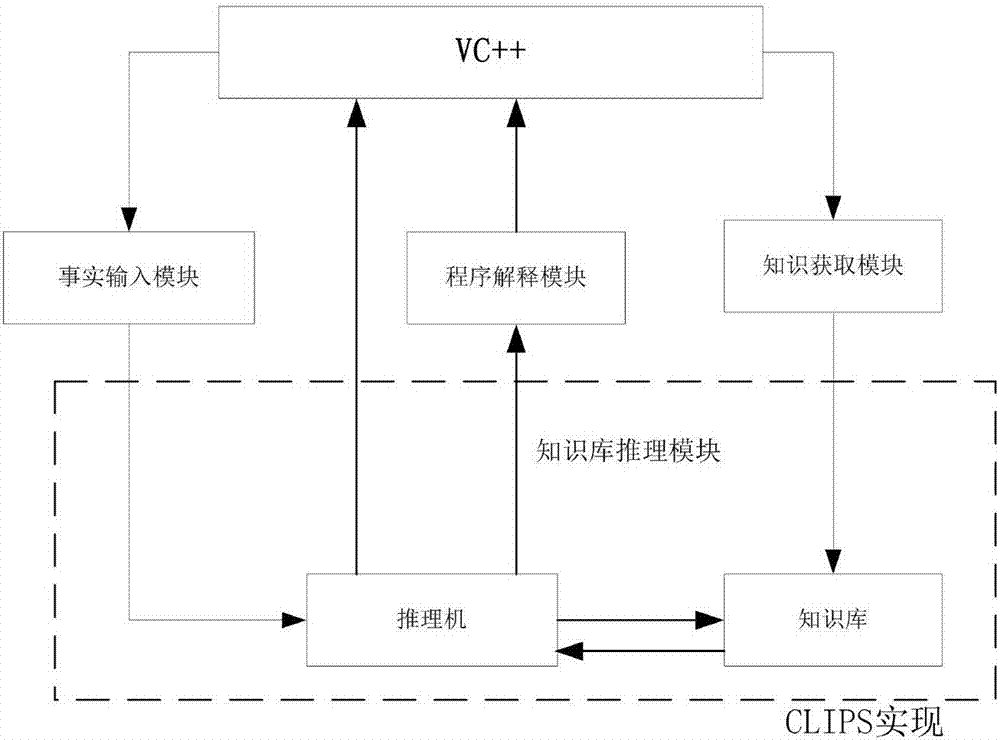
[0051] In this embodiment, VC++ is used as the main development platform of the whole system, and the MAPX control is integrated to develop the man-machine interface, process and exchange data with the database system and the outside. CLIPS is used to develop the expert system, which is embedded in the main C++ program as an internal reasoning engine. The exchange between the expert system and the external system is handled by the C++ program; the complex numerical calculation encountered in the reasoning process of CLIPS, and the interaction with the man-machine interface and peripherals are completed by calling the external functions written in C++.
[0052] In this embodiment, the combination of CLIPS and VC++ is realized by means of a dynamic link library. Two files are needed, one is the DLL dynamic library file of CLIPS, and the other is the wrapping class file CLIPWrap.
[0053] (1) Create an MFC project ClipsTest.
[0054] (2) Copy the two header files dynclips.h and...
Embodiment 3
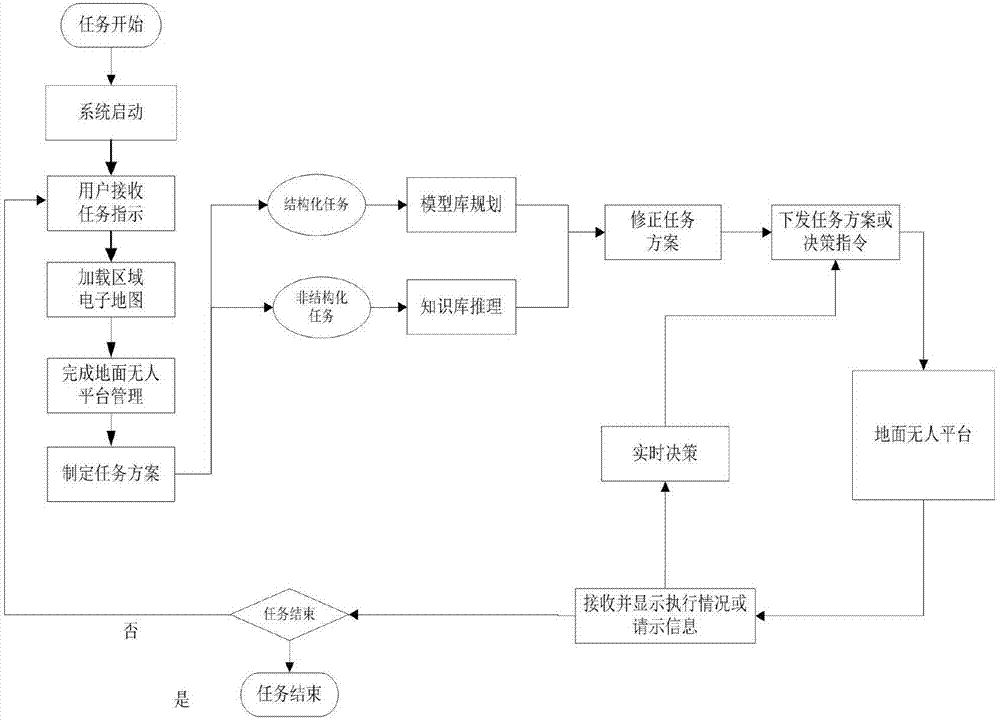
[0076] The present invention assists the user to implement the upper-level target intention and implement task planning, which itself is a process based on interactive interface planning, which starts with task release and ends with task completion. Such as image 3 The usage process of this embodiment shown is as follows:
[0077] Step 1: System startup;
[0078] Step 2: Receive the superior task, the user accepts the task instruction, and enters the task into the database;
[0079] Step: 3: load area map, user loads area electronic map, provides map description for planning task;
[0080] Step 4: Load tank members, the user selects the number of tanks according to the task, loads the members of the unmanned platform, and determines the ID, IP address and other parameters of the unmanned platform;
[0081] Step 5: Start automatic mission planning. According to the task type, the model base planning method is used for structured tasks, and the knowledge base reasoning is use...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More