

Active pose quick relocation method without camera calibration
A camera calibration and relocation technology, which is applied in complex mathematical operations, measuring devices, instruments, etc., can solve problems such as active pose relocation, and achieve insensitive lighting conditions, good real-time performance, and high flexibility Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0043] An active pose fast relocation method without camera calibration of the present invention will be described in detail below with reference to the embodiments and the accompanying drawings.
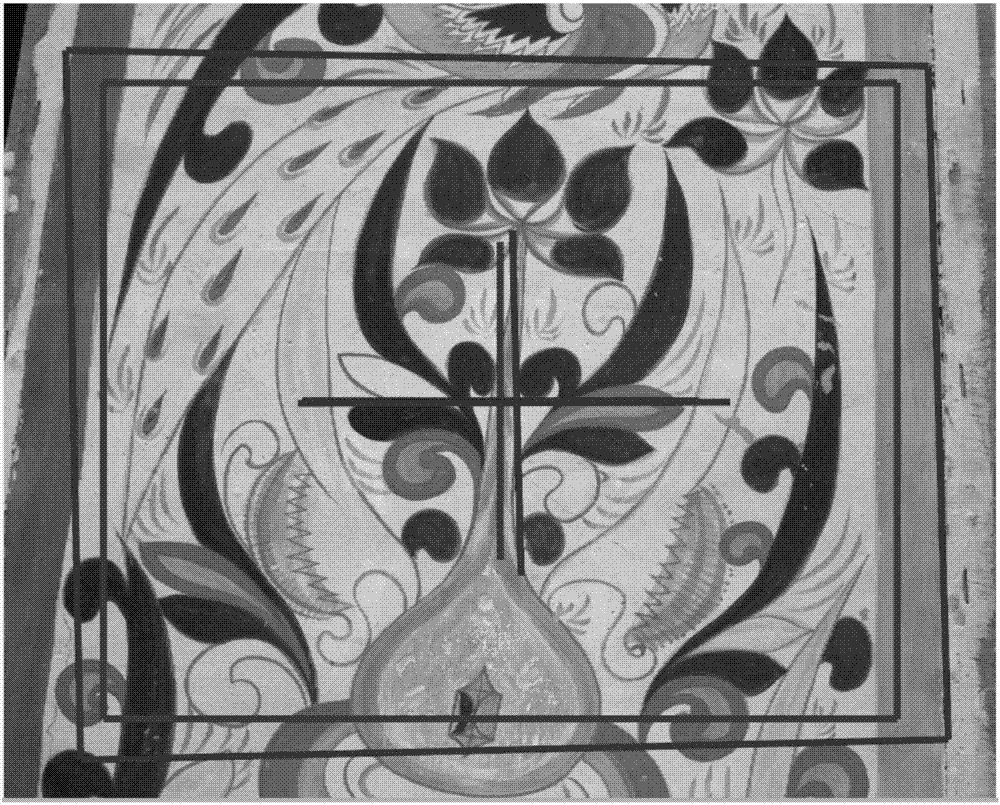
[0044] An active pose fast relocation method without camera calibration of the present invention, by calculating the homography transformation relationship between the captured image in the current state and the image in the previous state, and feeding back the movement control variables of six degrees of freedom, Instruct the operator or actuator to move in the correct direction.
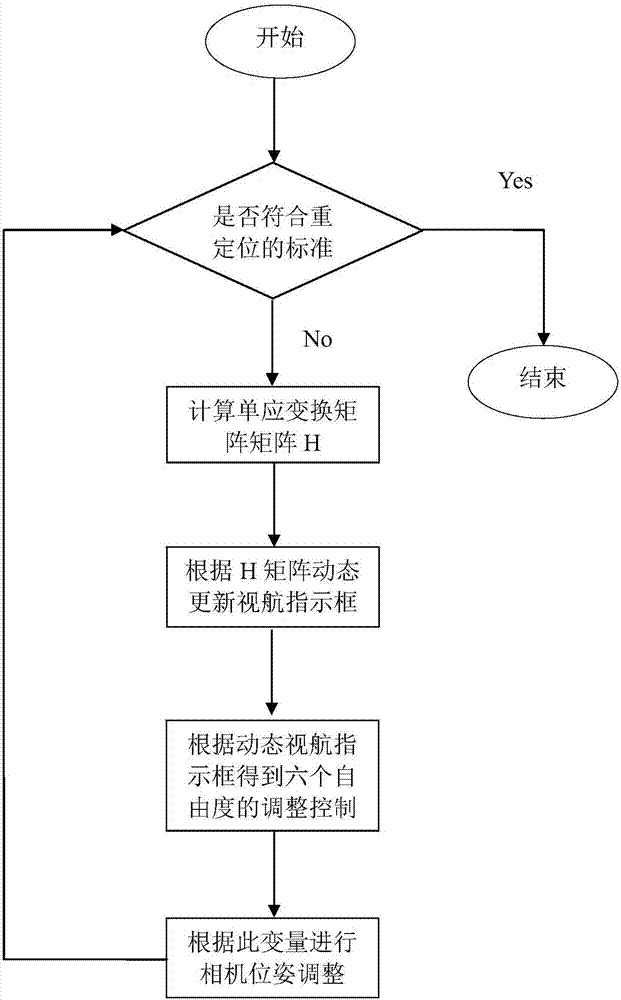
[0045] Such as figure 1 As shown, an active pose fast relocation method without camera calibration of the present invention includes the following steps:
[0046] 1) Determine whether the set relocation standard is met. There is an end standard for this active camera pose fast relocation. At the beginning, it is necessary to compare the current state with the standard. If the relocation standard is met,...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More