

Soft robotic actuators utilizing asymmetric surfaces
A technology of actuators and robots, which can be applied to fluid pressure actuation devices, manipulators, program-controlled manipulators, etc., and can solve problems such as the unsuitability of rigid skeletons
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] Hereinafter, the present invention will be described in more detail with reference to the accompanying drawings showing preferred embodiments of the invention. This invention may however be embodied in various different ways and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, the same reference numerals denote the same components throughout.
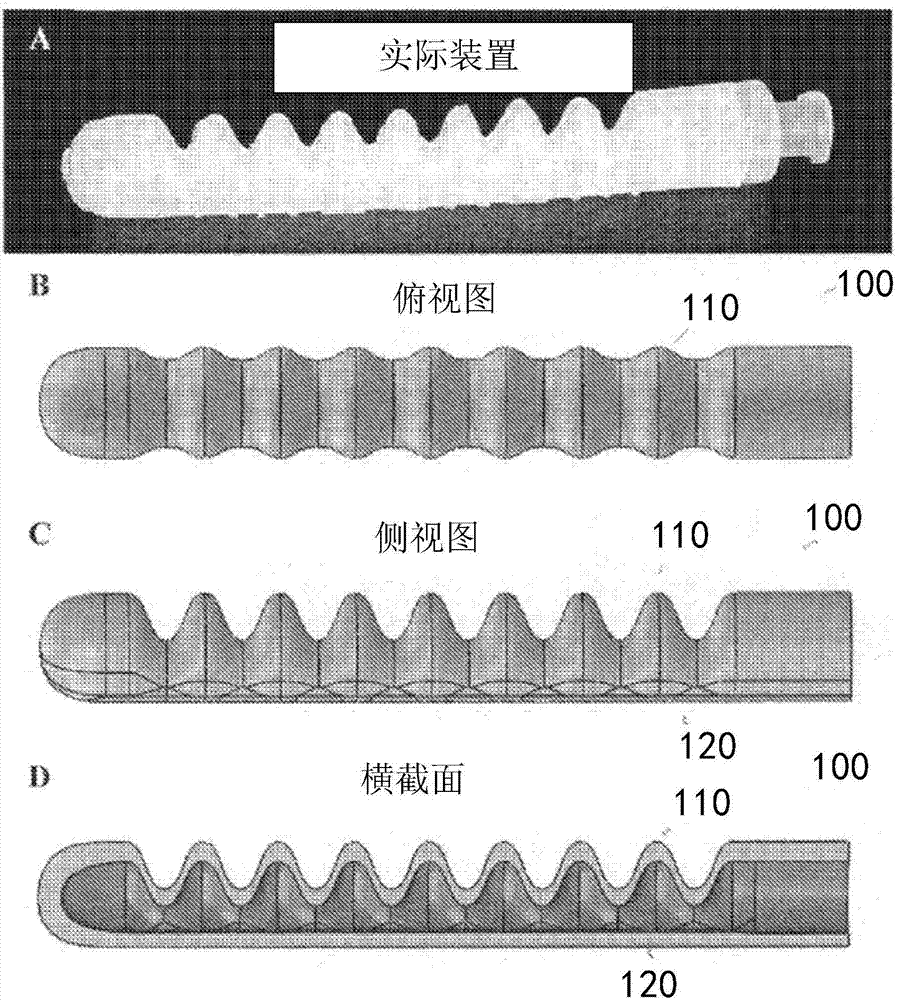
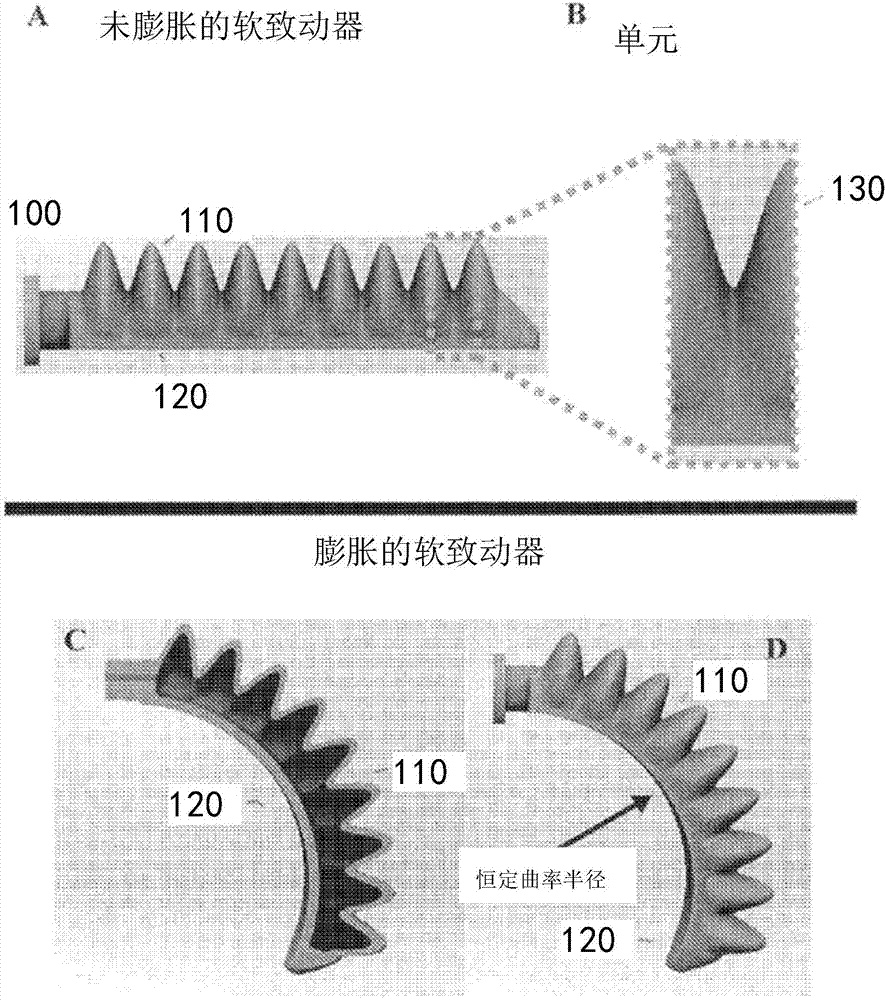
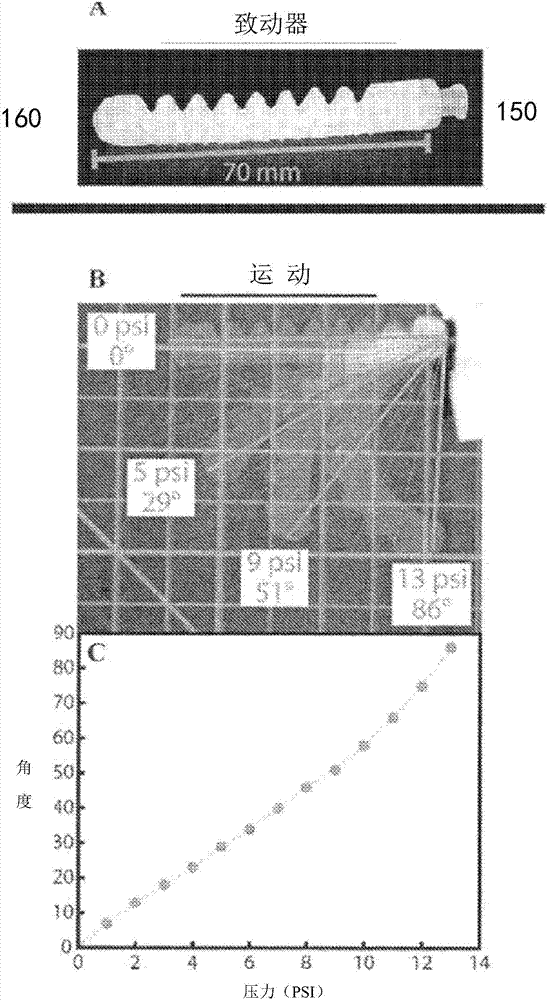
[0034] According to the present disclosure, there is provided a compact portable "soft robotic" actuator that bends or otherwise changes its profile upon changes in curvature caused by the planned deployment of the actuator and the stretching of the strained region. Actuators according to various embodiments of the invention utilize arc length motion between opposing surfaces of the actuator to facilitate proportionality...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More