

Two-input two-output NDCS time-varying delay compensation and control method
A technology of time delay compensation and control method, applied in the direction of program control, comprehensive factory control, electrical program control, etc., can solve the problems of complex influence, complex internal structure, failure of control components, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0163] The following will refer to the attached Figure 6 Exemplary embodiments of the present invention are described in detail to make the above-mentioned features and advantages of the present invention more apparent to those skilled in the art.
[0164] The specific implementation steps are as follows:
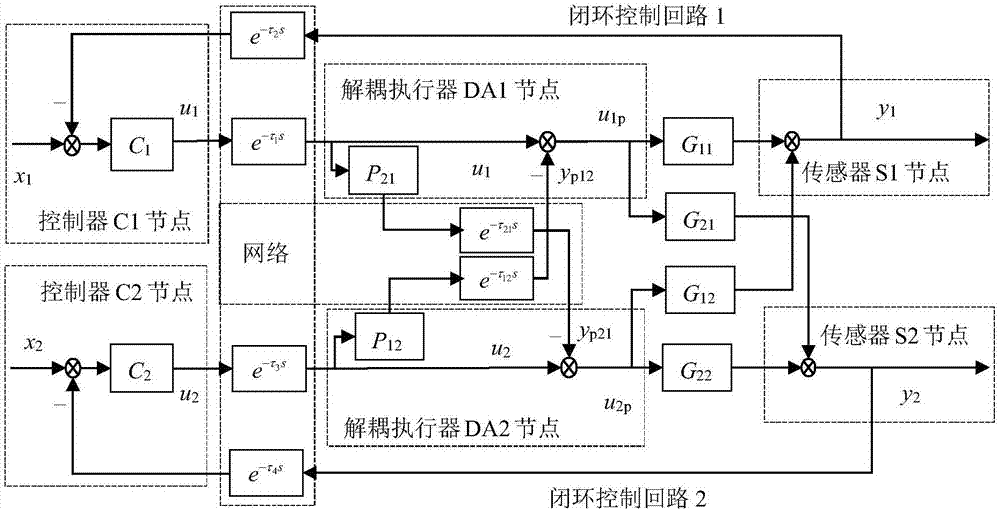
[0165] For closed loop control loop 1:
[0166] Step 1: The sensor S1 node works in the time-driven mode, when the sensor S1 node is cycled for h 1After the sampling signal of is triggered, the controlled object G 11 (s) output signal y 11 (s) and the controlled object cross-channel transfer function G 12 (s) output signal y 12 (s), and the output signal y of the A1 node of the actuator 11mb (s) Sampling and calculating the system output signal y of the closed-loop control loop 1 1 (s) and the feedback signal y 1b (s), and y 1 (s)=y 11 (s)+y 12 (s) and y 1b (s)=y 1 (s)-y 11mb (s);
[0167] Step 2: The sensor S1 node will feed back the signal y 1b (s), trans...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More