

Shock-absorbing clamping device for robot and intelligent box carrying method based on device
A clamping device and robot technology, used in chucks, manipulators, manufacturing tools, etc., can solve the problems of not easy to control clamping force, unstable clamping, lack of elastic components, etc., and achieve obvious and large vibration isolation and amplitude reduction. Displacement compensation capability, easy assembly and disassembly, and easy maintenance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiment of the present invention will be further described below in conjunction with accompanying drawing:
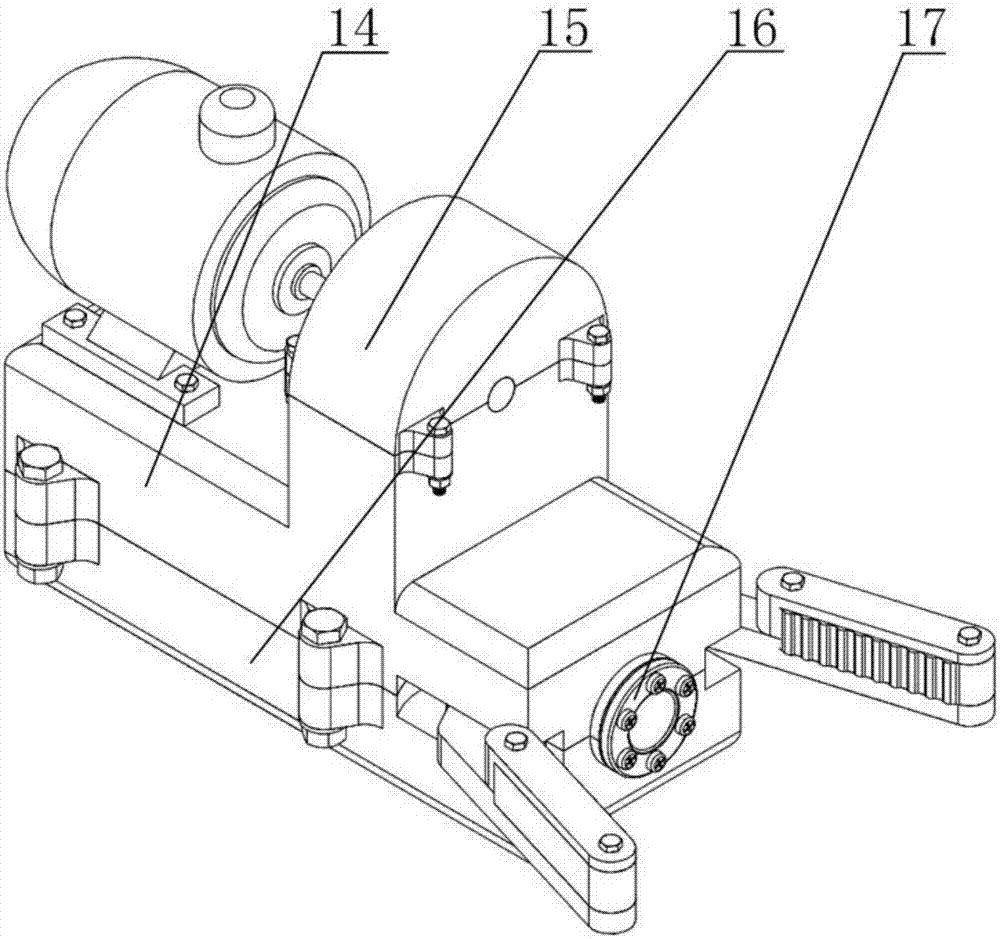
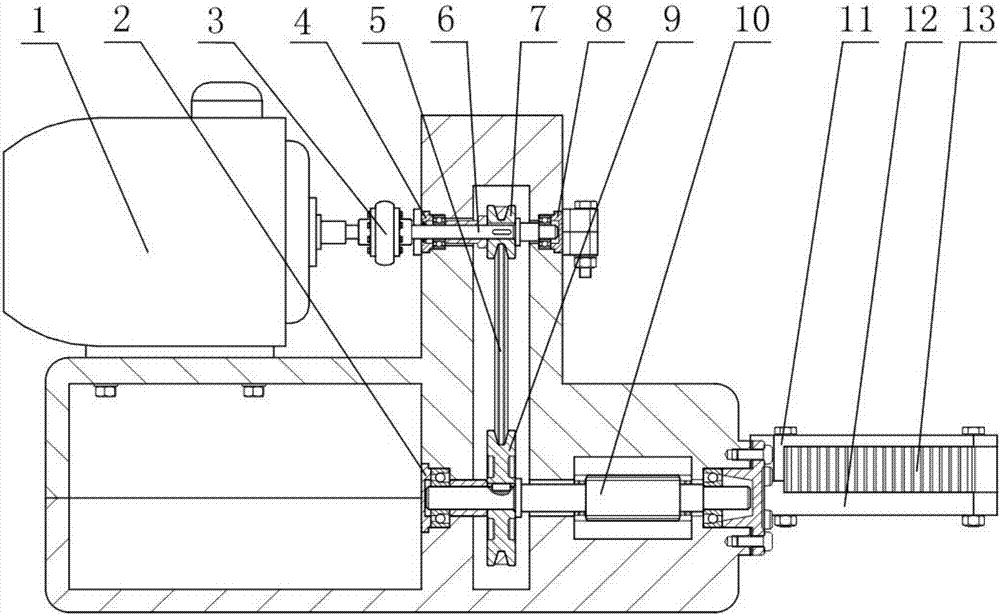
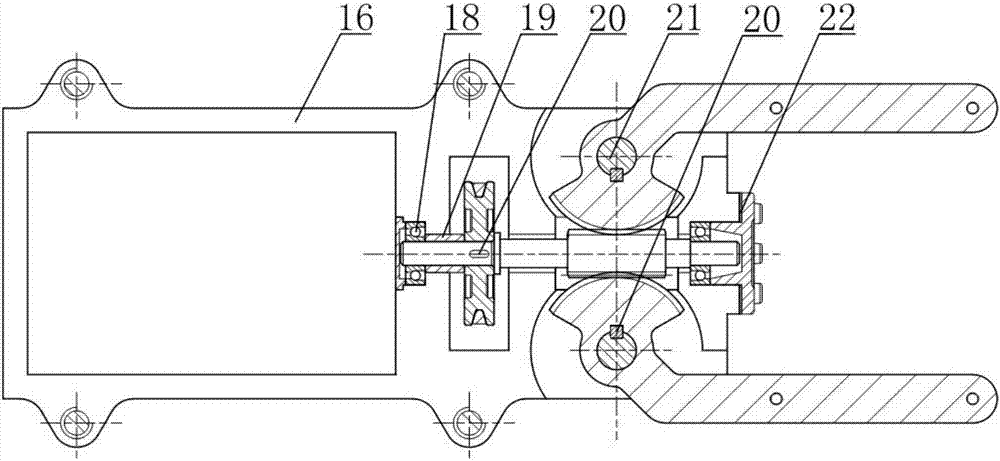
[0036] Such as Figure 1-Figure 3 As shown, the robot vibration-reducing clamping device of the present invention is composed of a motor 1, a transmission device and a gripper. The transmission device includes a worm gear mechanism. Rotate and open around the center of symmetry to realize clamping and loosening actions; the transmission device also includes a tire coupling 3 and a belt transmission mechanism; the motor 1 is connected to the small pulley shaft 6 of the belt transmission mechanism through the tire coupling 3 (Such as Figure 4 As shown), the large pulley shaft of the belt transmission mechanism and the worm in the worm gear mechanism are integrated ( Figure 5No. 10 shown in ); the worm drives two jaws through two symmetrically arranged worm gears, and the jaws and the corresponding worm gear are integrated ( Figure 6 No. 12 sho...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More