

UAV indoor positioning system and positioning method based on cooperation target and monocular vision
A monocular vision, indoor positioning technology, applied in control/adjustment systems, three-dimensional position/channel control, vehicle position/route/altitude control, etc. The effect of interacting with the environment and increasing the speed of computation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0027] The present invention will be further described in detail below in conjunction with the drawings and specific embodiments. It should be understood that the specific embodiments described herein are only used to explain the present invention, but not to limit the present invention.
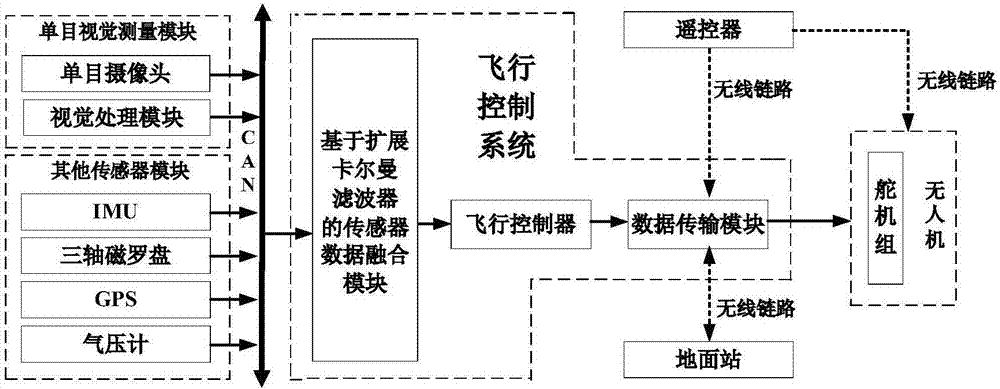
[0028] As shown in the figure, a UAV indoor positioning system based on cooperative targets and monocular vision of the present invention includes multiple identifiers with coded information arranged on the indoor ground or on a certain facade, Monocular vision system module, sensor module and flight control system,
[0029] The monocular vision system module includes a monocular camera and a visual information processing unit. The monocular camera is used to obtain marker information during flight and transmit the video stream to the visual information processing unit through the CAN data bus. The visual information processing unit includes a processing system containing dual processing cores o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More