

Three-eye depth obtaining camera with adjustable optical axes
An adjustable camera technology, applied in image communication, electrical components, stereo systems, etc., can solve the problems of low resolution, affecting the quality of imaging and ranging, and failing to meet the viewing angle requirements, so as to improve efficiency and improve measurement accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
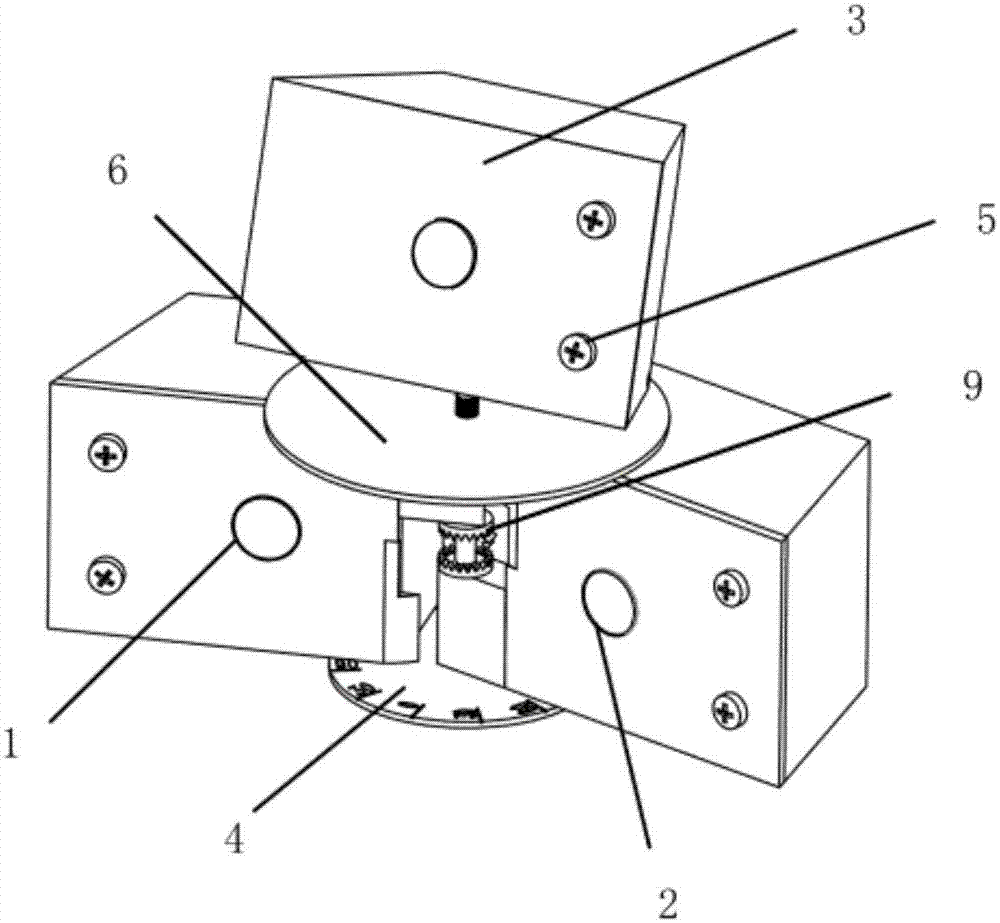
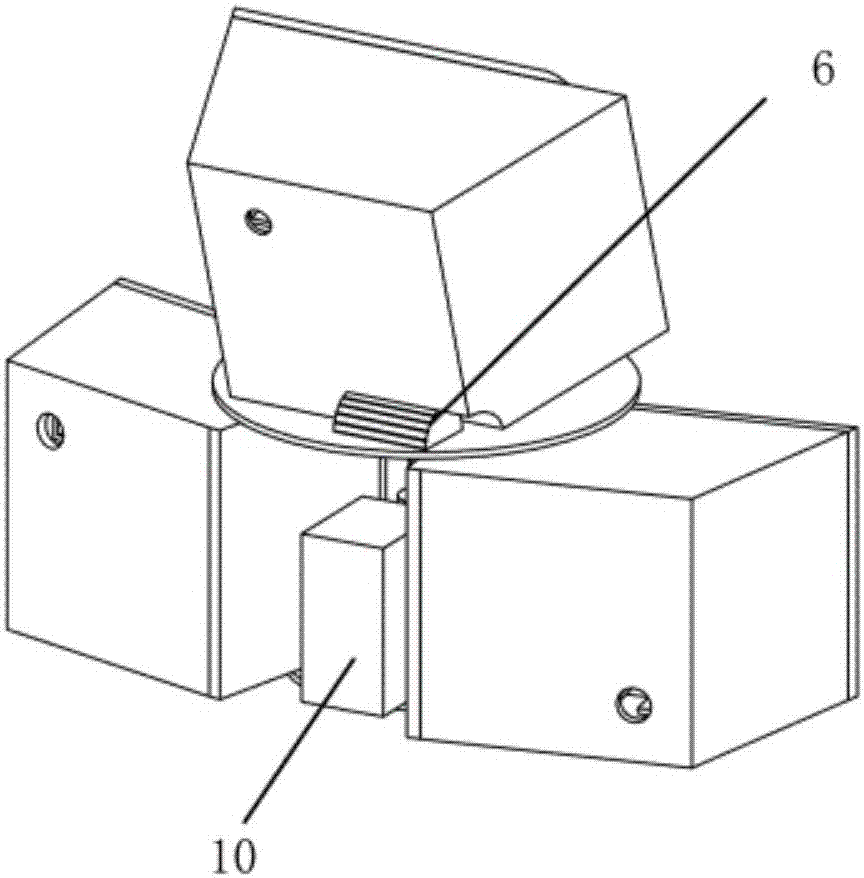
[0036] The optical axis adjustable trinocular depth acquisition camera includes a left camera 1 , a right camera 2 and an upper active camera 3 . Such as figure 1 , 2 , 3, the left camera 1 and the right camera 2 are matched through 8 shaft holes of the threaded rod, and then tightened with the nut 7 to fix the angle of the binocular camera, and the angle can be read with the code disc 4. The pitch angle and rotation angle of the upper active camera 3 can also be read out through the corresponding code disc. The left and right cameras are ordinary imaging cameras, which do not have the function of active depth acquisition, and their depth measurement is obtained through digital image processing technology. The upper camera uses an active depth camera, such as a TOF camera, to directly obtain a depth cloud image with low precision. Each camera is connected to the host computer respectively.
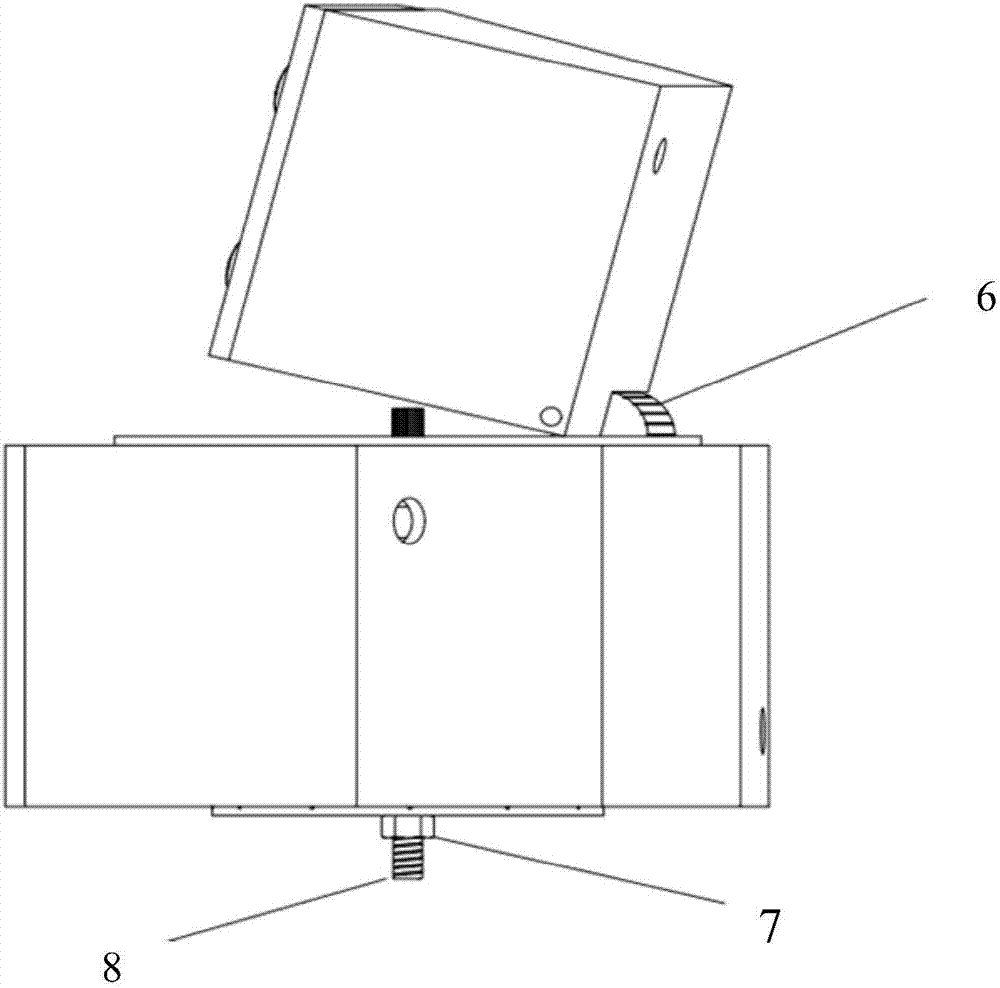
[0037] Such as Figure 5 Shown, threaded rod 8 upper ends adopt frictional design...
Embodiment 2
[0040] according to Figure 8 In the flow chart shown, depth information is acquired through the processes of angle adjustment S11 , photographing acquisition S12 , stereo matching S13 and depth calculation S14 . Among them, the stereo matching algorithm marks the pixel points (blocks) where the left camera 1 and the right camera 2 match each other, and a local stereo matching algorithm can be selected, specifically:
[0041] 1. Construct a small window, similar to a convolution kernel.
[0042] 2. Use the window to cover the image on the left, and select all the pixels in the area covered by the window.
[0043] 3. Also use the window to cover the image on the right and select the pixels in the covered area.
[0044] 4. Subtract the right coverage area from the left coverage area, and calculate the sum of the absolute values of all pixel point differences.
[0045] 5. Move the window of the image on the right, and repeat steps 3 and 4. (There is a search range here, jum...
Embodiment 3
[0050] Such as Figure 7 Shown is the schematic diagram of non-parallel optical axes.
[0051] According to the relevant principles of epipolar geometry, the vertical distance from the point P to the origin O can be obtained by means of plane geometry. The coordinate system is established as shown in the figure, and the equations of the two incident rays can be obtained:
[0052]
[0053]
[0054] in is the angle between the left and right cameras and the direction facing the world coordinates, in this embodiment T is the distance from the main optical axis of the camera to the rotation point, f is the focal length of the left and right cameras, and x is the coordinate of the image coordinate system of the left and right cameras. x L is the coordinate of the left camera image coordinate system, x R is the coordinate of the right camera image coordinate system.
[0055] Simultaneously, the value of distance Z can be obtained as:
[0056]
[0057] Thus, the dista...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More